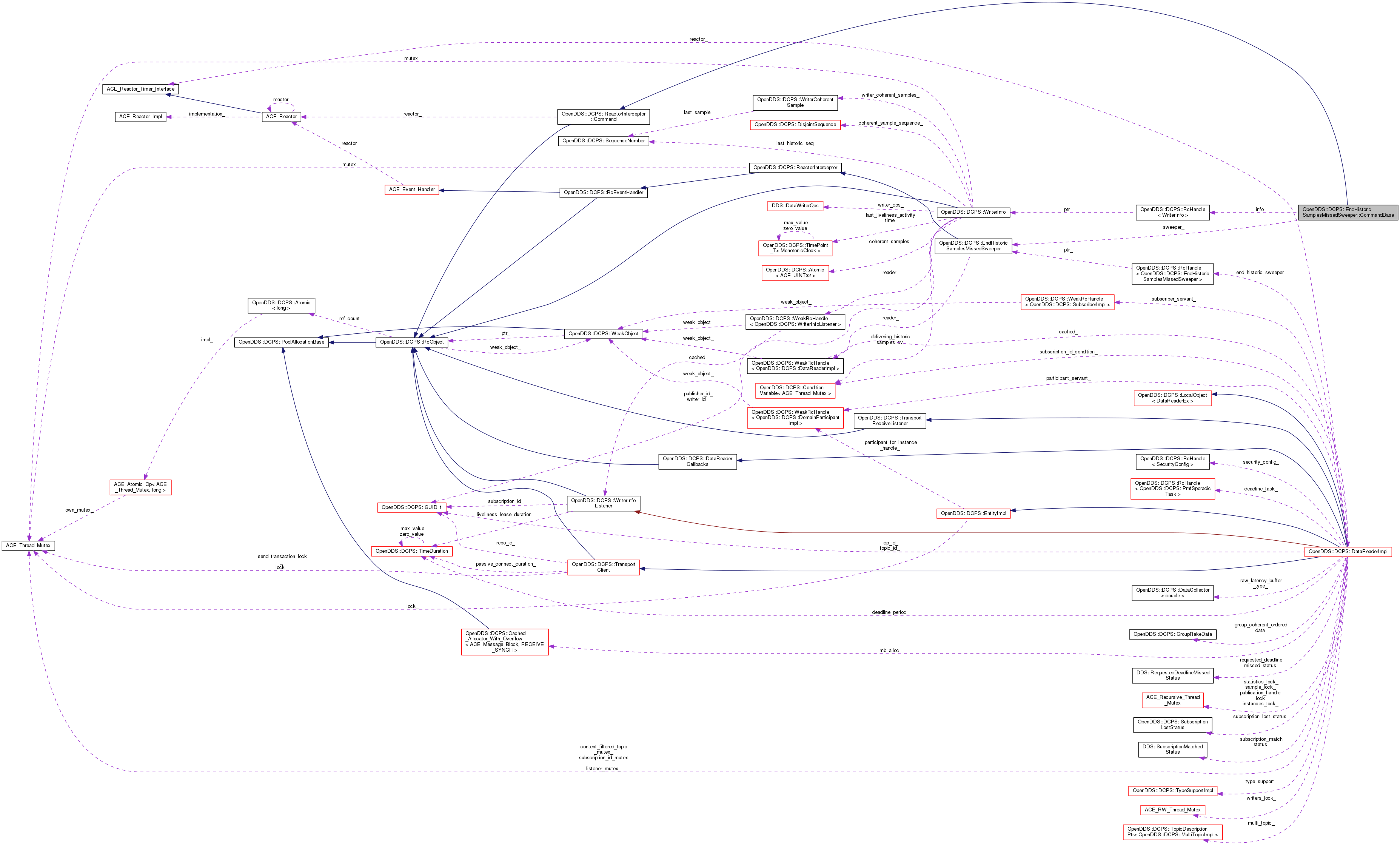
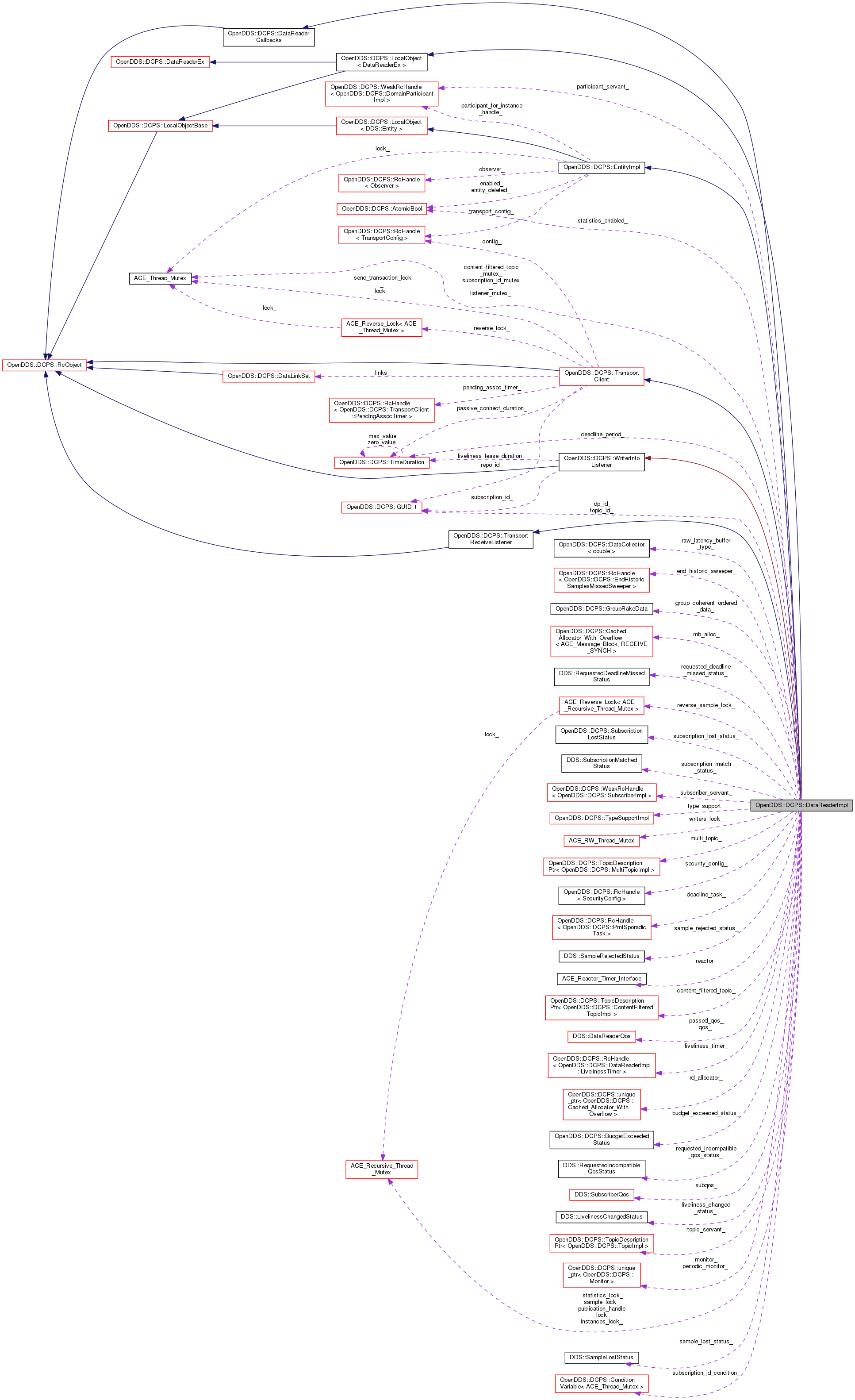
Implements the DDS::DataReader interface. More...
#include <DataReaderImpl.h>
Classes | |
| struct | GenericBundle |
| class | LivelinessTimer |
| class | OnDataAvailable |
| class | OnDataOnReaders |
| class | OwnershipManagerPtr |
| struct | OwnershipManagerScopedAccess |
Public Types | |
| typedef std::pair< GUID_t, WriterInfo::WriterState > | WriterStatePair |
 Public Types inherited from OpenDDS::DCPS::LocalObject< DataReaderEx > Public Types inherited from OpenDDS::DCPS::LocalObject< DataReaderEx > | |
| typedef DataReaderEx ::_ptr_type | _ptr_type |
| typedef DataReaderEx ::_var_type | _var_type |
| Public Types inherited from CORBA::LocalObject | |
| typedef LocalObject_ptr | _ptr_type |
| typedef LocalObject_var | _var_type |
| typedef LocalObject_out | _out_type |
| Public Types inherited from CORBA::Object | |
| typedef Object_ptr | _ptr_type |
| typedef Object_var | _var_type |
| typedef Object_out | _out_type |
| Public Types inherited from OpenDDS::DCPS::LocalObject< DDS::Entity > | |
| typedef DDS::Entity ::_ptr_type | _ptr_type |
| typedef DDS::Entity ::_var_type | _var_type |
| Public Types inherited from OpenDDS::DCPS::TransportClient | |
| enum | { ASSOC_OK = 1, ASSOC_ACTIVE = 2 } |
Protected Types | |
| typedef ACE_Reverse_Lock< ACE_Recursive_Thread_Mutex > | Reverse_Lock_t |
Static Protected Member Functions | |
| static CORBA::ULong | to_combined_states (CORBA::ULong sample_states, CORBA::ULong view_states, CORBA::ULong instance_states) |
| static void | split_combined_states (CORBA::ULong combined, CORBA::ULong &sample_states, CORBA::ULong &view_states, CORBA::ULong &instance_states) |
Static Protected Attributes | |
| static const CORBA::ULong | MAX_SAMPLE_STATE_FLAG = DDS::NOT_READ_SAMPLE_STATE |
| static const CORBA::ULong | MAX_SAMPLE_STATE_MASK = (MAX_SAMPLE_STATE_FLAG << 1) - 1 |
| static const CORBA::ULong | MAX_SAMPLE_STATE_BITS = 2u |
| static const CORBA::ULong | MAX_VIEW_STATE_FLAG = DDS::NOT_NEW_VIEW_STATE |
| static const CORBA::ULong | MAX_VIEW_STATE_MASK = (MAX_VIEW_STATE_FLAG << 1) - 1 |
| static const CORBA::ULong | MAX_VIEW_STATE_BITS = 2u |
| static const CORBA::ULong | MAX_INSTANCE_STATE_FLAG = DDS::NOT_ALIVE_NO_WRITERS_INSTANCE_STATE |
| static const CORBA::ULong | MAX_INSTANCE_STATE_MASK = (MAX_INSTANCE_STATE_FLAG << 1) - 1 |
| static const CORBA::ULong | MAX_INSTANCE_STATE_BITS = 3u |
| static const CORBA::ULong | COMBINED_VIEW_STATE_SHIFT = MAX_INSTANCE_STATE_BITS |
| static const CORBA::ULong | COMBINED_SAMPLE_STATE_SHIFT = COMBINED_VIEW_STATE_SHIFT + MAX_VIEW_STATE_BITS |
Private Types | |
| typedef PmfSporadicTask< DataReaderImpl > | DRISporadicTask |
| typedef VarLess< DDS::ReadCondition > | RCCompLess |
Friends | |
| class | RequestedDeadlineWatchdog |
| class | QueryConditionImpl |
| class | SubscriberImpl |
| class | OwnershipManagerPtr |
| class | InstanceState |
| class | EndHistoricSamplesMissedSweeper |
| class | ::DDS_TEST |
Detailed Description
Implements the DDS::DataReader interface.
See the DDS specification, OMG formal/2015-04-10, for a description of the interface this class is implementing.
This class must be inherited by the type-specific datareader which is specific to the data-type associated with the topic.
Definition at line 207 of file DataReaderImpl.h.
Member Typedef Documentation
◆ DRISporadicTask
|
private |
Definition at line 994 of file DataReaderImpl.h.
◆ RCCompLess
|
private |
Definition at line 1037 of file DataReaderImpl.h.
◆ Reverse_Lock_t
|
protected |
Definition at line 782 of file DataReaderImpl.h.
◆ WriterStatePair
| typedef std::pair<GUID_t, WriterInfo::WriterState> OpenDDS::DCPS::DataReaderImpl::WriterStatePair |
Definition at line 455 of file DataReaderImpl.h.
Constructor & Destructor Documentation
◆ DataReaderImpl()
| OpenDDS::DCPS::DataReaderImpl::DataReaderImpl | ( | ) |
Definition at line 60 of file DataReaderImpl.cpp.
References DDS::LivelinessChangedStatus::alive_count, DDS::LivelinessChangedStatus::alive_count_change, budget_exceeded_status_, DDS::SubscriptionMatchedStatus::current_count, DDS::SubscriptionMatchedStatus::current_count_change, DDS::HANDLE_NIL, OpenDDS::DCPS::BudgetExceededStatus::last_instance_handle, DDS::SampleRejectedStatus::last_instance_handle, DDS::RequestedDeadlineMissedStatus::last_instance_handle, DDS::RequestedIncompatibleQosStatus::last_policy_id, DDS::LivelinessChangedStatus::last_publication_handle, DDS::SubscriptionMatchedStatus::last_publication_handle, DDS::SampleRejectedStatus::last_reason, liveliness_changed_status_, monitor_, DDS::LivelinessChangedStatus::not_alive_count, DDS::LivelinessChangedStatus::not_alive_count_change, DDS::NOT_REJECTED, periodic_monitor_, DDS::RequestedIncompatibleQosStatus::policies, reactor_, requested_deadline_missed_status_, requested_incompatible_qos_status_, sample_lost_status_, sample_rejected_status_, subscription_match_status_, TheServiceParticipant, OpenDDS::DCPS::BudgetExceededStatus::total_count, DDS::SampleLostStatus::total_count, DDS::SampleRejectedStatus::total_count, DDS::RequestedDeadlineMissedStatus::total_count, DDS::RequestedIncompatibleQosStatus::total_count, DDS::SubscriptionMatchedStatus::total_count, OpenDDS::DCPS::BudgetExceededStatus::total_count_change, DDS::SampleLostStatus::total_count_change, DDS::SampleRejectedStatus::total_count_change, DDS::RequestedDeadlineMissedStatus::total_count_change, DDS::RequestedIncompatibleQosStatus::total_count_change, and DDS::SubscriptionMatchedStatus::total_count_change.
◆ ~DataReaderImpl()
|
virtual |
Definition at line 136 of file DataReaderImpl.cpp.
References DBG_ENTRY_LVL, deadline_task_, participant_servant_, and OpenDDS::DCPS::WriterInfoListener::subscription_id_.
Member Function Documentation
◆ accept_coherent()
| void OpenDDS::DCPS::DataReaderImpl::accept_coherent | ( | const GUID_t & | writer_id, |
| const GUID_t & | publisher_id | ||
| ) |
Definition at line 2914 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_GUARD, ACE_TEXT(), OpenDDS::DCPS::DCPS_debug_level, and LM_DEBUG.
◆ accept_sample_processing()
|
protected |
Definition at line 3345 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_READ_GUARD, ACE_TEXT(), OpenDDS::DCPS::LogGuid::c_str(), OpenDDS::DCPS::DataSampleHeader::coherent_change_, OpenDDS::DCPS::SubscriptionInstance::cur_sample_tv_, OpenDDS::DCPS::GUID_t::entityId, OpenDDS::DCPS::EntityId_t::entityKind, OpenDDS::DCPS::ENTITYKIND_OPENDDS_NIL_WRITER, OpenDDS::DCPS::DataSampleHeader::group_coherent_, OpenDDS::DCPS::RcHandle< T >::in(), OpenDDS::DCPS::SubscriptionInstance::last_sample_tv_, LM_WARNING, OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now(), OpenDDS::DCPS::DataSampleHeader::publication_id_, OpenDDS::DCPS::DataSampleHeader::publisher_id_, and OpenDDS::DCPS::TimePoint_T< AceClock >::set_to_now().
Referenced by data_received().
◆ add_association()
|
virtual |
Implements OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 237 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_ERROR, ACE_TEXT(), ACE_WRITE_GUARD, OpenDDS::DCPS::TransportClient::associate(), OpenDDS::DCPS::LogGuid::c_str(), OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::AssociationData::discovery_locator_, DDS::DataWriterQos::durability, DDS::DataReaderQos::durability, OpenDDS::DCPS::Observer::e_ASSOCIATED, OpenDDS::DCPS::EntityImpl::get_deleted(), get_guid(), OpenDDS::DCPS::EntityImpl::get_observer(), OpenDDS::DCPS::GUID_UNKNOWN, has_subscription_id_, is_bit_, DDS::DurabilityQosPolicy::kind, DDS::ReliabilityQosPolicy::kind, LM_DEBUG, LM_ERROR, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_all(), OpenDDS::DCPS::Observer::on_associated(), OpenDDS::DCPS::AssociationData::participant_discovered_at_, OpenDDS::DCPS::WriterAssociation::participantDiscoveredAt, OpenDDS::DCPS::AssociationData::publication_transport_priority_, qos_, raw_latency_buffer_size_, raw_latency_buffer_type_, DDS::DataWriterQos::reliability, DDS::RELIABLE_RELIABILITY_QOS, OpenDDS::DCPS::AssociationData::remote_data_, OpenDDS::DCPS::AssociationData::remote_durable_, OpenDDS::DCPS::AssociationData::remote_id_, OpenDDS::DCPS::AssociationData::remote_reliable_, OpenDDS::DCPS::AssociationData::remote_transport_context_, statistics_, statistics_lock_, OpenDDS::DCPS::WriterInfoListener::subscription_id_, subscription_id_condition_, subscription_id_mutex_, DDS::DataWriterQos::transport_priority, OpenDDS::DCPS::WriterAssociation::transportContext, DDS::TransportPriorityQosPolicy::value, DDS::VOLATILE_DURABILITY_QOS, OpenDDS::DCPS::WriterInfo::waiting_for_end_historic_samples(), OpenDDS::DCPS::WriterAssociation::writerDiscInfo, OpenDDS::DCPS::WriterAssociation::writerId, OpenDDS::DCPS::WriterAssociation::writerQos, writers_, writers_lock_, and OpenDDS::DCPS::WriterAssociation::writerTransInfo.
◆ add_link()
|
protectedvirtual |
Reimplemented from OpenDDS::DCPS::TransportClient.
Definition at line 3226 of file DataReaderImpl.cpp.
References ACE_WRITE_GUARD, OpenDDS::DCPS::TransportClient::add_link(), OpenDDS::DCPS::DataLink::impl(), OPENDDS_STRING, OpenDDS::DCPS::TransportImpl::transport_type(), and DDS::VOLATILE_DURABILITY_QOS.
◆ begin_access()
| void OpenDDS::DCPS::DataReaderImpl::begin_access | ( | ) |
Definition at line 3068 of file DataReaderImpl.cpp.
References ACE_GUARD.
◆ cancel_all_deadlines()
|
private |
Definition at line 3683 of file DataReaderImpl.cpp.
References ACE_GUARD.
Referenced by qos_change().
◆ cancel_deadline()
|
private |
Definition at line 3597 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::SubscriptionInstance::deadline_, and OpenDDS::DCPS::TimePoint_T< MonotonicClock >::zero_value.
Referenced by data_received().
◆ check_historic()
|
private |
collect samples received before END_HISTORIC_SAMPLES returns false if normal processing of this sample should be skipped
Definition at line 3195 of file DataReaderImpl.cpp.
References ACE_WRITE_GUARD_RETURN, OpenDDS::DCPS::ReceivedDataSample::header_, OpenDDS::DCPS::DataSampleHeader::historic_sample_, OpenDDS::DCPS::DataSampleHeader::publication_id_, OpenDDS::DCPS::DataSampleHeader::sequence_, and OpenDDS::DCPS::SequenceNumber::SEQUENCENUMBER_UNKNOWN().
Referenced by data_received().
◆ check_transport_qos()
|
virtual |
Implements OpenDDS::DCPS::TransportClient.
Definition at line 1684 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::TransportInst::is_reliable(), DDS::ReliabilityQosPolicy::kind, qos_, DDS::DataReaderQos::reliability, and DDS::RELIABLE_RELIABILITY_QOS.
◆ cleanup()
|
virtual |
Definition at line 155 of file DataReaderImpl.cpp.
References content_filtered_topic_, content_filtered_topic_mutex_, multi_topic_, OpenDDS::DCPS::NO_STATUS_MASK, ownership_manager(), set_listener(), topic_servant_, and OpenDDS::DCPS::OwnershipManager::unregister_reader().
Referenced by OpenDDS::DCPS::MultiTopicDataReaderBase::cleanup().
◆ coherent_change_received() [1/2]
| void OpenDDS::DCPS::DataReaderImpl::coherent_change_received | ( | const GUID_t & | publisher_id, |
| Coherent_State & | result | ||
| ) |
Definition at line 2987 of file DataReaderImpl.cpp.
References ACE_READ_GUARD, OpenDDS::DCPS::COMPLETED, OpenDDS::DCPS::NOT_COMPLETED_YET, OpenDDS::DCPS::REJECTED, and state.
◆ coherent_change_received() [2/2]
|
private |
◆ coherent_changes_completed()
| void OpenDDS::DCPS::DataReaderImpl::coherent_changes_completed | ( | DataReaderImpl * | reader | ) |
Definition at line 3011 of file DataReaderImpl.cpp.
References ACE_GUARD, DDS::DATA_AVAILABLE_STATUS, DDS::DATA_ON_READERS_STATUS, OpenDDS::DCPS::RcHandle< T >::in(), CORBA::is_nil(), OpenDDS::DCPS::rchandle_from(), and TheServiceParticipant.
◆ contains_sample()
| bool OpenDDS::DCPS::DataReaderImpl::contains_sample | ( | DDS::SampleStateMask | sample_states, |
| DDS::ViewStateMask | view_states, | ||
| DDS::InstanceStateMask | instance_states | ||
| ) |
Fold-in the three separate loops of have_sample_states(), have_view_states(), and have_instance_states(). Takes the sample_lock_.
Definition at line 1743 of file DataReaderImpl.cpp.
References instances_lock_, lookup_matching_instances(), and sample_lock_.
Referenced by OpenDDS::DCPS::ReadConditionImpl::get_trigger_value().
◆ contains_sample_filtered()
|
pure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by OpenDDS::DCPS::QueryConditionImpl::get_trigger_value().
◆ create_querycondition()
|
virtual |
Definition at line 771 of file DataReaderImpl.cpp.
References ACE_ERROR, ACE_GUARD_RETURN, ACE_TEXT(), OpenDDS::DCPS::DCPS_debug_level, LM_ERROR, QueryConditionImpl, read_conditions_, DDS::RETCODE_OK, and sample_lock_.
◆ create_readcondition()
|
virtual |
Definition at line 758 of file DataReaderImpl.cpp.
References ACE_GUARD_RETURN, read_conditions_, and sample_lock_.
◆ data_received()
|
virtual |
process a message that has been received - could be control or a data sample.
Implements OpenDDS::DCPS::TransportReceiveListener.
Definition at line 1371 of file DataReaderImpl.cpp.
References accept_sample_processing(), ACE_DEBUG, ACE_ERROR, ACE_GUARD, ACE_READ_GUARD, ACE_TEXT(), OpenDDS::DCPS::DataSampleHeader::byte_order_, OpenDDS::DCPS::LogGuid::c_str(), cancel_deadline(), check_historic(), OpenDDS::DCPS::ReceivedDataSample::data(), OpenDDS::DCPS::DATAWRITER_LIVELINESS, DBG_ENTRY_LVL, OpenDDS::DCPS::DCPS_debug_level, dds_demarshal(), deadline_queue_enabled_, OpenDDS::DCPS::DISPOSE_INSTANCE, dispose_unregister(), OpenDDS::DCPS::DISPOSE_UNREGISTER_INSTANCE, dup(), OpenDDS::DCPS::Observer::e_SAMPLE_RECEIVED, OpenDDS::DCPS::END_COHERENT_CHANGES, OpenDDS::DCPS::END_HISTORIC_SAMPLES, OpenDDS::DCPS::ENDIAN_BIG, OpenDDS::DCPS::ENDIAN_LITTLE, filter_sample(), OpenDDS::DCPS::FULL_MARSHALING, OpenDDS::DCPS::RcHandle< T >::get(), OpenDDS::DCPS::EntityImpl::get_deleted(), get_guid(), OpenDDS::DCPS::EntityImpl::get_observer(), get_subscriber_servant(), get_value_dispatcher(), OpenDDS::DCPS::GUID_UNKNOWN, DDS::HANDLE_NIL, header, OpenDDS::DCPS::ReceivedDataSample::header_, OpenDDS::DCPS::RcHandle< T >::in(), OpenDDS::DCPS::SubscriptionInstance::instance_handle_, OpenDDS::DCPS::INSTANCE_REGISTRATION, OpenDDS::DCPS::DataSampleHeader::instance_state(), OpenDDS::DCPS::SubscriptionInstance::instance_state_, instances_, instances_lock_, is_exclusive_ownership_, OpenDDS::DCPS::InstanceState::is_last(), OpenDDS::DCPS::OwnershipManager::is_owner(), OpenDDS::DCPS::DataSampleHeader::key_fields_only_, OpenDDS::DCPS::KEY_ONLY_MARSHALING, OpenDDS::DCPS::Encoding::KIND_UNALIGNED_CDR, LM_DEBUG, LM_ERROR, LM_INFO, LM_WARNING, lookup_instance(), mb_alloc_, OpenDDS::DCPS::DataSampleHeader::message_id_, OpenDDS::DCPS::DataSampleHeader::message_length_, notify_read_conditions(), OpenDDS::DCPS::Observer::on_sample_received(), ownership_manager(), process_latency(), publication_handle_lock_, OpenDDS::DCPS::DataSampleHeader::publication_id_, publication_id_to_handle_map_, OpenDDS::DCPS::TransportClient::repo_id(), OpenDDS::DCPS::RcHandle< T >::reset(), resume_sample_processing(), OpenDDS::DCPS::SAMPLE_DATA, sample_lock_, OpenDDS::DCPS::DataSampleHeader::sequence_, OpenDDS::DCPS::WriterInfo::set_group_info(), OpenDDS::DCPS::DataSampleHeader::source_timestamp_nanosec_, OpenDDS::DCPS::DataSampleHeader::source_timestamp_sec_, timestamp(), OpenDDS::DCPS::to_string(), OpenDDS::DCPS::UNREGISTER_INSTANCE, verify_coherent_changes_completion(), writer_activity(), writers_, and writers_lock_.
◆ dds_demarshal()
|
pure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by data_received().
◆ deadline_task()
|
private |
Definition at line 3739 of file DataReaderImpl.cpp.
References ACE_GUARD, OPENDDS_END_VERSIONED_NAMESPACE_DECL, and TheServiceParticipant.
◆ delete_contained_entities()
|
virtual |
Implements DDS::DataReader.
Definition at line 816 of file DataReaderImpl.cpp.
References ACE_GUARD_RETURN, read_conditions_, DDS::RETCODE_OK, DDS::RETCODE_OUT_OF_RESOURCES, and sample_lock_.
◆ delete_readcondition()
|
virtual |
Definition at line 806 of file DataReaderImpl.cpp.
References ACE_GUARD_RETURN, read_conditions_, DDS::RETCODE_OK, DDS::RETCODE_OUT_OF_RESOURCES, DDS::RETCODE_PRECONDITION_NOT_MET, and sample_lock_.
◆ deliver_historic()
|
private |
deliver samples that were held by check_historic()
Definition at line 3215 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::ReceivedDataSample::header_, OpenDDS::DCPS::DataSampleHeader::historic_sample_, and OpenDDS::DCPS::OPENDDS_MAP().
◆ disable_transport()
| ACE_INLINE void OpenDDS::DCPS::DataReaderImpl::disable_transport | ( | ) |
Definition at line 33 of file DataReaderImpl.inl.
References OPENDDS_END_VERSIONED_NAMESPACE_DECL, and transport_disabled_.
Referenced by OpenDDS::RTPS::RtpsDiscovery::create_bit_dr(), and OpenDDS::DCPS::StaticDiscovery::create_bit_dr().
◆ dispose_unregister()
|
virtual |
Reimplemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Definition at line 2275 of file DataReaderImpl.cpp.
References ACE_DEBUG, OpenDDS::DCPS::DCPS_debug_level, and LM_DEBUG.
Referenced by data_received().
◆ domain_id()
|
inlineprivatevirtual |
◆ enable()
|
virtual |
Implements DDS::Entity.
Definition at line 1115 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_ERROR, ACE_GUARD_RETURN, ACE_INT32_MAX, ACE_TEXT(), OpenDDS::DCPS::TypeSupportImpl::add_types(), OpenDDS::DCPS::TransportClient::connection_info(), content_filtered_topic_, content_filtered_topic_mutex_, OpenDDS::DCPS::DCPS_debug_level, DDS::DataReaderQos::deadline, deadline_period_, deadline_queue_enabled_, DDS::HistoryQosPolicy::depth, depth_, domain_id_, dp_id_, DDS::DURATION_INFINITE_NSEC, DDS::DURATION_INFINITE_SEC, dynamic_type_, OpenDDS::DCPS::Observer::e_ENABLED, enable_specific(), OpenDDS::DCPS::TransportClient::enable_transport(), get_guid(), OpenDDS::DCPS::EntityImpl::get_observer(), get_subscriber_servant(), OpenDDS::DCPS::TypeSupportImpl::get_type(), OpenDDS::DCPS::GUID_UNKNOWN, has_subscription_id_, DDS::DataReaderQos::history, TAO::String_var< charT >::in(), install_type_support(), OpenDDS::DCPS::EntityImpl::is_enabled(), DDS::KEEP_ALL_HISTORY_QOS, DDS::ReliabilityQosPolicy::kind, DDS::HistoryQosPolicy::kind, DDS::LivelinessQosPolicy::lease_duration, DDS::LENGTH_UNLIMITED, DDS::DataReaderQos::liveliness, OpenDDS::DCPS::WriterInfoListener::liveliness_lease_duration_, LM_DEBUG, LM_ERROR, LM_WARNING, DDS::ResourceLimitsQosPolicy::max_samples, DDS::ResourceLimitsQosPolicy::max_samples_per_instance, monitor_, n_chunks_, name, DDS::Duration_t::nanosec, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_all(), OpenDDS::DCPS::Observer::on_enabled(), participant_servant_, DDS::DeadlineQosPolicy::period, qos_, OpenDDS::DCPS::rchandle_from(), rd_allocator_, DDS::DataReaderQos::reliability, DDS::RELIABLE_RELIABILITY_QOS, DDS::DataReaderQos::representation, DDS::DataReaderQos::resource_limits, DDS::RETCODE_ERROR, DDS::RETCODE_OK, DDS::RETCODE_PRECONDITION_NOT_MET, sample_lock_, DDS::Duration_t::sec, security_config_, OpenDDS::DCPS::EntityImpl::set_enabled(), OpenDDS::DCPS::set_reader_effective_data_rep_qos(), setup_deserialization(), OpenDDS::DCPS::WriterInfoListener::subscription_id_, subscription_id_condition_, subscription_id_mutex_, TheServiceParticipant, OpenDDS::DCPS::TypeSupportImpl::to_type_info(), topic_servant_, transport_disabled_, DDS::DataRepresentationQosPolicy::value, and DDS::VOLATILE_DURABILITY_QOS.
Referenced by OpenDDS::RTPS::RtpsDiscovery::create_bit_dr(), OpenDDS::DCPS::StaticDiscovery::create_bit_dr(), and OpenDDS::DCPS::SubscriberImpl::create_datareader().
◆ enable_filtering()
| void OpenDDS::DCPS::DataReaderImpl::enable_filtering | ( | ContentFilteredTopicImpl * | cft | ) |
Definition at line 3124 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::ContentFilteredTopicImpl::add_reader().
Referenced by OpenDDS::DCPS::SubscriberImpl::create_datareader().
◆ enable_multi_topic()
| void OpenDDS::DCPS::DataReaderImpl::enable_multi_topic | ( | MultiTopicImpl * | mt | ) |
Definition at line 3143 of file DataReaderImpl.cpp.
Referenced by OpenDDS::DCPS::MultiTopicDataReaderBase::init().
◆ enable_specific()
|
protectedpure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by enable().
◆ end_access()
| void OpenDDS::DCPS::DataReaderImpl::end_access | ( | ) |
Definition at line 3075 of file DataReaderImpl.cpp.
References ACE_GUARD.
◆ filter_sample()
|
protected |
Check if the received data sample or instance should be filtered.
- Note
- Filtering will only occur if the application configured a finite duration in the Topic's LIFESPAN QoS policy or DataReader's TIME_BASED_FILTER QoS policy.
Definition at line 2583 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::DataSampleHeader::historic_sample_, OpenDDS::DCPS::DataSampleHeader::lifespan_duration_, OpenDDS::DCPS::DataSampleHeader::lifespan_duration_nanosec_, OpenDDS::DCPS::DataSampleHeader::lifespan_duration_sec_, LM_DEBUG, OpenDDS::DCPS::TimePoint_T< SystemClock >::now(), ACE_Time_Value::sec(), OpenDDS::DCPS::DataSampleHeader::source_timestamp_nanosec_, OpenDDS::DCPS::DataSampleHeader::source_timestamp_sec_, ACE_Time_Value::usec(), OpenDDS::DCPS::TimeDuration::value(), and DDS::VOLATILE_DURABILITY_QOS.
Referenced by data_received().
◆ get_builtin_subscriber_proxy()
|
inlineprivatevirtual |
Reimplemented from OpenDDS::DCPS::TransportClient.
Definition at line 837 of file DataReaderImpl.h.
References OpenDDS::DCPS::WeakRcHandle< T >::lock().
◆ get_cf_topic()
| DDS::ContentFilteredTopic_ptr OpenDDS::DCPS::DataReaderImpl::get_cf_topic | ( | ) | const |
Definition at line 3134 of file DataReaderImpl.cpp.
◆ get_crypto_handle()
|
privatevirtual |
Reimplemented from OpenDDS::DCPS::TransportClient.
Definition at line 3404 of file DataReaderImpl.cpp.
References DDS::HANDLE_NIL.
◆ get_depth()
|
inline |
Definition at line 410 of file DataReaderImpl.h.
◆ get_dp_id()
| OpenDDS::DCPS::GUID_t OpenDDS::DCPS::DataReaderImpl::get_dp_id | ( | ) |
Definition at line 2816 of file DataReaderImpl.cpp.
Referenced by OpenDDS::DCPS::DRMonitorImpl::report().
◆ get_ext_listener()
|
protected |
Definition at line 926 of file DataReaderImpl.cpp.
References listener_, and listener_mutex_.
◆ get_guid()
|
inlinevirtual |
Implements OpenDDS::DCPS::TransportClient.
Definition at line 628 of file DataReaderImpl.h.
References TheServiceParticipant.
Referenced by add_association(), data_received(), enable(), OpenDDS::Federator::ManagerImpl::initialize(), remove_associations(), remove_associations_i(), OpenDDS::DCPS::DRPeriodicMonitorImpl::report(), OpenDDS::DCPS::DRMonitorImpl::report(), transport_assoc_done(), and writer_activity().
◆ get_handle_instance()
|
protected |
Definition at line 2424 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_GUARD_RETURN, ACE_TEXT(), and LM_WARNING.
Referenced by release_instance().
◆ get_ice_endpoint()
|
virtual |
Implements OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 3286 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::TransportClient::get_ice_endpoint().
◆ get_instance_handle()
|
virtual |
Implements OpenDDS::DCPS::EntityImpl.
Definition at line 230 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::EntityImpl::get_entity_instance_handle(), participant_servant_, and OpenDDS::DCPS::WriterInfoListener::subscription_id_.
◆ get_instance_handles()
| void OpenDDS::DCPS::DataReaderImpl::get_instance_handles | ( | InstanceHandleVec & | instance_handles | ) |
Definition at line 2822 of file DataReaderImpl.cpp.
References ACE_GUARD.
Referenced by OpenDDS::DCPS::DRMonitorImpl::report().
◆ get_latency_stats()
|
virtual |
Definition at line 2369 of file DataReaderImpl.cpp.
◆ get_listener()
|
virtual |
Implements DDS::DataReader.
Definition at line 920 of file DataReaderImpl.cpp.
References listener_, and listener_mutex_.
◆ get_liveliness_changed_status()
|
virtual |
Definition at line 963 of file DataReaderImpl.cpp.
References DDS::LivelinessChangedStatus::alive_count_change, DDS::LIVELINESS_CHANGED_STATUS, liveliness_changed_status_, DDS::LivelinessChangedStatus::not_alive_count_change, DDS::RETCODE_OK, sample_lock_, and OpenDDS::DCPS::EntityImpl::set_status_changed_flag().
◆ get_matched_publication_data()
|
virtual |
Definition at line 1082 of file DataReaderImpl.cpp.
References ACE_ERROR_RETURN, ACE_TEXT(), OpenDDS::DCPS::BUILT_IN_PUBLICATION_TOPIC, OpenDDS::DCPS::EntityImpl::enabled_, OpenDDS::DCPS::RcHandle< T >::in(), LM_ERROR, participant_servant_, DDS::RETCODE_ERROR, DDS::RETCODE_NOT_ENABLED, and DDS::RETCODE_OK.
◆ get_matched_publications()
|
virtual |
Definition at line 1051 of file DataReaderImpl.cpp.
References ACE_ERROR_RETURN, ACE_GUARD_RETURN, ACE_TEXT(), OpenDDS::DCPS::EntityImpl::enabled_, LM_ERROR, publication_handle_lock_, publication_id_to_handle_map_, DDS::RETCODE_ERROR, DDS::RETCODE_NOT_ENABLED, and DDS::RETCODE_OK.
◆ get_n_chunks()
|
inline |
◆ get_next_handle()
|
protected |
Get an instance handle for a new instance.
Definition at line 2442 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::bit_key_to_guid(), and DDS::HANDLE_NIL.
◆ get_ordered_data()
| void OpenDDS::DCPS::DataReaderImpl::get_ordered_data | ( | GroupRakeData & | data, |
| DDS::SampleStateMask | sample_states, | ||
| DDS::ViewStateMask | view_states, | ||
| DDS::InstanceStateMask | instance_states | ||
| ) |
Definition at line 3084 of file DataReaderImpl.cpp.
References ACE_GUARD, OpenDDS::DCPS::ReceivedDataElementList::get_next_match(), OpenDDS::DCPS::GroupRakeData::insert_sample(), OpenDDS::DCPS::SubscriptionInstance::instance_state_, OpenDDS::DCPS::InstanceState::match(), and OpenDDS::DCPS::SubscriptionInstance::rcvd_samples_.
◆ get_priority_value()
|
inlineprivatevirtual |
Implements OpenDDS::DCPS::TransportClient.
Definition at line 849 of file DataReaderImpl.h.
References OpenDDS::DCPS::OPENDDS_MAP(), and OpenDDS::DCPS::AssociationData::publication_transport_priority_.
◆ get_qos()
|
virtual |
Definition at line 902 of file DataReaderImpl.cpp.
References passed_qos_, and DDS::RETCODE_OK.
Referenced by OpenDDS::DCPS::StaticDiscovery::pre_reader().
◆ get_reactor()
| ACE_Reactor_Timer_Interface * OpenDDS::DCPS::DataReaderImpl::get_reactor | ( | void | ) |
Definition at line 2804 of file DataReaderImpl.cpp.
◆ get_requested_deadline_missed_status()
|
virtual |
Definition at line 979 of file DataReaderImpl.cpp.
References last_deadline_missed_total_count_, DDS::REQUESTED_DEADLINE_MISSED_STATUS, requested_deadline_missed_status_, DDS::RETCODE_OK, sample_lock_, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), DDS::RequestedDeadlineMissedStatus::total_count, and DDS::RequestedDeadlineMissedStatus::total_count_change.
◆ get_requested_incompatible_qos_status()
|
virtual |
Definition at line 1004 of file DataReaderImpl.cpp.
References publication_handle_lock_, DDS::REQUESTED_INCOMPATIBLE_QOS_STATUS, requested_incompatible_qos_status_, DDS::RETCODE_OK, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), and DDS::RequestedIncompatibleQosStatus::total_count_change.
◆ get_sample_lost_status()
|
virtual |
Definition at line 1031 of file DataReaderImpl.cpp.
References DDS::RETCODE_OK, sample_lock_, DDS::SAMPLE_LOST_STATUS, sample_lost_status_, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), and DDS::SampleLostStatus::total_count_change.
◆ get_sample_rejected_status()
|
virtual |
Definition at line 951 of file DataReaderImpl.cpp.
References DDS::RETCODE_OK, sample_lock_, DDS::SAMPLE_REJECTED_STATUS, sample_rejected_status_, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), and DDS::SampleRejectedStatus::total_count_change.
◆ get_subscriber()
|
virtual |
Implements DDS::DataReader.
Definition at line 945 of file DataReaderImpl.cpp.
References get_subscriber_servant().
Referenced by OpenDDS::DCPS::StaticDiscovery::pre_reader(), and OpenDDS::DCPS::DRMonitorImpl::report().
◆ get_subscriber_servant()
|
protected |
Definition at line 1712 of file DataReaderImpl.cpp.
References subscriber_servant_.
Referenced by data_received(), enable(), get_subscriber(), listener_for(), and set_qos().
◆ get_subscription_matched_status()
|
virtual |
Definition at line 1017 of file DataReaderImpl.cpp.
References DDS::SubscriptionMatchedStatus::current_count_change, publication_handle_lock_, DDS::RETCODE_OK, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), subscription_match_status_, DDS::SUBSCRIPTION_MATCHED_STATUS, and DDS::SubscriptionMatchedStatus::total_count_change.
◆ get_topic_id()
| OpenDDS::DCPS::GUID_t OpenDDS::DCPS::DataReaderImpl::get_topic_id | ( | ) |
Definition at line 2810 of file DataReaderImpl.cpp.
Referenced by OpenDDS::DCPS::DRMonitorImpl::report().
◆ get_topicdescription()
|
virtual |
Implements DDS::DataReader.
Definition at line 932 of file DataReaderImpl.cpp.
References content_filtered_topic_, content_filtered_topic_mutex_, and topic_desc_.
Referenced by OpenDDS::DCPS::QueryConditionImpl::get_type_support(), and OpenDDS::DCPS::MultiTopicDataReader_T< Sample, TypedDataReader >::join().
◆ get_value_dispatcher()
|
inline |
Definition at line 640 of file DataReaderImpl.h.
Referenced by data_received().
◆ get_writer_states()
| void OpenDDS::DCPS::DataReaderImpl::get_writer_states | ( | WriterStatePairVec & | writer_states | ) |
Definition at line 2834 of file DataReaderImpl.cpp.
References ACE_READ_GUARD.
Referenced by OpenDDS::DCPS::DRMonitorImpl::report().
◆ has_readcondition()
|
protected |
Definition at line 799 of file DataReaderImpl.cpp.
References read_conditions_.
◆ has_zero_copies()
| bool OpenDDS::DCPS::DataReaderImpl::has_zero_copies | ( | ) |
This method is used for a precondition check of delete_datareader.
- Return values
-
true We have zero-copy samples loaned out false We have no zero-copy samples loaned out
Definition at line 2726 of file DataReaderImpl.cpp.
References ACE_GUARD_RETURN, OpenDDS::DCPS::ReceivedDataElementList::has_zero_copies(), and OpenDDS::DCPS::SubscriptionInstance::rcvd_samples_.
◆ have_instance_states()
| bool OpenDDS::DCPS::DataReaderImpl::have_instance_states | ( | DDS::InstanceStateMask | instance_states | ) | const |
!!caller should have acquired sample_lock_
Definition at line 1733 of file DataReaderImpl.cpp.
References DDS::ANY_SAMPLE_STATE, DDS::ANY_VIEW_STATE, instances_lock_, and lookup_matching_instances().
◆ have_sample_states()
| bool OpenDDS::DCPS::DataReaderImpl::have_sample_states | ( | DDS::SampleStateMask | sample_states | ) | const |
!!caller should have acquired sample_lock_
Definition at line 1717 of file DataReaderImpl.cpp.
References DDS::ANY_INSTANCE_STATE, DDS::ANY_VIEW_STATE, instances_lock_, and lookup_matching_instances().
Referenced by OpenDDS::DCPS::MultiTopicDataReaderBase::have_sample_states().
◆ have_view_states()
| bool OpenDDS::DCPS::DataReaderImpl::have_view_states | ( | DDS::ViewStateMask | view_states | ) | const |
!!caller should have acquired sample_lock_
Definition at line 1726 of file DataReaderImpl.cpp.
References DDS::ANY_INSTANCE_STATE, DDS::ANY_SAMPLE_STATE, instances_lock_, and lookup_matching_instances().
◆ init()
| void OpenDDS::DCPS::DataReaderImpl::init | ( | TopicDescriptionImpl * | a_topic_desc, |
| const DDS::DataReaderQos & | qos, | ||
| DDS::DataReaderListener_ptr | a_listener, | ||
| const DDS::StatusMask & | mask, | ||
| DomainParticipantImpl * | participant, | ||
| SubscriberImpl * | subscriber | ||
| ) |
Definition at line 184 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), domain_id_, DDS::EXCLUSIVE_OWNERSHIP_QOS, OpenDDS::DCPS::DomainParticipantImpl::get_domain_id(), OpenDDS::DCPS::TopicDescriptionImpl::get_name(), OpenDDS::DCPS::SubscriberImpl::get_qos(), OpenDDS::DCPS::TopicDescriptionImpl::get_type_name(), is_bit_, is_exclusive_ownership_, DDS::OwnershipQosPolicy::kind, LM_WARNING, DDS::DataReaderQos::ownership, participant_servant_, passed_qos_, qos_, OpenDDS::DCPS::rchandle_from(), DDS::RETCODE_OK, set_listener(), subscriber_servant_, topic_desc_, topic_id_, topic_servant_, OpenDDS::DCPS::topicIsBIT(), and type_support_.
Referenced by OpenDDS::RTPS::RtpsDiscovery::create_bit_dr(), OpenDDS::DCPS::StaticDiscovery::create_bit_dr(), OpenDDS::DCPS::SubscriberImpl::create_datareader(), and OpenDDS::DCPS::MultiTopicDataReaderBase::init().
◆ initialize_lookup_maps()
|
protected |
Definition at line 3533 of file DataReaderImpl.cpp.
◆ install_type_support()
|
inlineprivatevirtual |
Reimplemented in OpenDDS::XTypes::DynamicDataReaderImpl.
Definition at line 815 of file DataReaderImpl.h.
References timestamp().
Referenced by enable().
◆ instances_liveliness_update()
|
private |
Definition at line 2235 of file DataReaderImpl.cpp.
References ACE_GUARD, DDS::NOT_ALIVE_NO_WRITERS_INSTANCE_STATE, and OpenDDS::DCPS::TimePoint_T< SystemClock >::now().
◆ is_bit()
| bool OpenDDS::DCPS::DataReaderImpl::is_bit | ( | ) | const |
Definition at line 2720 of file DataReaderImpl.cpp.
◆ listener_for()
| DDS::DataReaderListener_ptr OpenDDS::DCPS::DataReaderImpl::listener_for | ( | DDS::StatusKind | kind | ) |
This is used to retrieve the listener for a certain status change. If this datareader has a registered listener and the status kind is in the listener mask then the listener is returned. Otherwise, the query for the listener is propagated up to the factory/subscriber.
Definition at line 1753 of file DataReaderImpl.cpp.
References get_subscriber_servant(), CORBA::is_nil(), listener_, listener_mask_, listener_mutex_, and ACE_Guard< ACE_LOCK >::release().
Referenced by remove_associations_i(), transport_assoc_done(), and update_incompatible_qos().
◆ liveliness_lost()
| void OpenDDS::DCPS::DataReaderImpl::liveliness_lost | ( | ) |
◆ lookup_instance()
|
pure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by data_received().
◆ lookup_instance_generic()
|
pure virtual |
◆ lookup_instance_handles()
|
private |
Lookup the instance handles by the publication repo ids.
Definition at line 2551 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), OpenDDS::DCPS::LogGuid::conv_, OpenDDS::DCPS::DCPS_debug_level, LM_DEBUG, and OPENDDS_STRING.
Referenced by remove_associations_i().
◆ lookup_matching_instances()
|
protected |
Definition at line 3569 of file DataReaderImpl.cpp.
References OPENDDS_ASSERT.
Referenced by contains_sample(), have_instance_states(), have_sample_states(), and have_view_states().
◆ notify_latency()
| void OpenDDS::DCPS::DataReaderImpl::notify_latency | ( | GUID_t | writer | ) |
Definition at line 2337 of file DataReaderImpl.cpp.
References CORBA::is_nil().
◆ notify_liveliness_change()
| void OpenDDS::DCPS::DataReaderImpl::notify_liveliness_change | ( | ) |
Definition at line 2747 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_GUARD, ACE_TEXT(), DDS::LivelinessChangedStatus::alive_count_change, OpenDDS::DCPS::LogGuid::conv_, OpenDDS::DCPS::DCPS_debug_level, CORBA::is_nil(), DDS::LIVELINESS_CHANGED_STATUS, LM_DEBUG, OPENDDS_STRING, and OpenDDS::DCPS::to_dds_string().
◆ notify_read_conditions()
|
protected |
Data has arrived into the cache, unblock waiting ReadConditions.
Definition at line 1692 of file DataReaderImpl.cpp.
References ACE_ERROR, ACE_GUARD, ACE_TEXT(), LM_ERROR, read_conditions_, reverse_sample_lock_, and OpenDDS::DCPS::ConditionImpl::signal_all().
Referenced by data_received().
◆ notify_subscription_disconnected()
|
virtual |
Implements OpenDDS::DCPS::TransportReceiveListener.
Definition at line 2466 of file DataReaderImpl.cpp.
References DBG_ENTRY_LVL, CORBA::is_nil(), and OpenDDS::DCPS::SubscriptionLostStatus::publication_handles.
◆ notify_subscription_lost() [1/2]
|
virtual |
Implements OpenDDS::DCPS::TransportReceiveListener.
Definition at line 2531 of file DataReaderImpl.cpp.
References DBG_ENTRY_LVL, CORBA::is_nil(), and OpenDDS::DCPS::SubscriptionLostStatus::publication_handles.
Referenced by remove_associations_i().
◆ notify_subscription_lost() [2/2]
|
private |
Definition at line 2506 of file DataReaderImpl.cpp.
References DBG_ENTRY_LVL, CORBA::is_nil(), and OpenDDS::DCPS::SubscriptionLostStatus::publication_handles.
◆ notify_subscription_reconnected()
|
virtual |
Implements OpenDDS::DCPS::TransportReceiveListener.
Definition at line 2485 of file DataReaderImpl.cpp.
References DBG_ENTRY_LVL, CORBA::is_nil(), and OpenDDS::DCPS::SubscriptionLostStatus::publication_handles.
◆ OPENDDS_MAP() [1/2]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_MAP | ( | DDS::InstanceHandle_t | , |
| SubscriptionInstance_rch | |||
| ) |
◆ OPENDDS_MAP() [2/2]
|
protected |
◆ OPENDDS_MAP_CMP() [1/3]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_MAP_CMP | ( | GUID_t | , |
| WriterStats | , | ||
| GUID_tKeyLessThan | |||
| ) |
Type of collection of statistics for writers to this reader.
◆ OPENDDS_MAP_CMP() [2/3]
|
private |
◆ OPENDDS_MAP_CMP() [3/3]
|
private |
publications writing to this reader.
◆ OPENDDS_MULTIMAP()
|
private |
◆ OPENDDS_SET() [1/4]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_SET | ( | DDS::InstanceHandle_t | ) |
◆ OPENDDS_SET() [2/4]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_SET | ( | SubscriptionInstance_rch | ) |
◆ OPENDDS_SET() [3/4]
|
protected |
◆ OPENDDS_SET() [4/4]
|
protected |
◆ OPENDDS_SET_CMP()
|
private |
◆ OPENDDS_VECTOR() [1/3]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_VECTOR | ( | DDS::InstanceHandle_t | ) |
Referenced by signal_liveliness().
◆ OPENDDS_VECTOR() [2/3]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_VECTOR | ( | WriterStatePair | ) |
◆ OPENDDS_VECTOR() [3/3]
| typedef OpenDDS::DCPS::DataReaderImpl::OPENDDS_VECTOR | ( | void * | ) |
◆ ownership_filter_instance()
|
protected |
Definition at line 2630 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), ACE_WRITE_GUARD_RETURN, OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::InstanceState::get_owner(), OpenDDS::DCPS::GUID_UNKNOWN, OpenDDS::DCPS::SubscriptionInstance::instance_handle_, OpenDDS::DCPS::SubscriptionInstance::instance_state_, LM_DEBUG, and OpenDDS::DCPS::OwnershipManager::select_owner().
◆ ownership_manager()
|
inline |
Definition at line 511 of file DataReaderImpl.h.
References lookup_instance(), and OpenDDS::DCPS::OPENDDS_VECTOR().
Referenced by cleanup(), data_received(), and release_instance().
◆ parent()
|
virtual |
Reimplemented from OpenDDS::DCPS::EntityImpl.
Definition at line 1678 of file DataReaderImpl.cpp.
References subscriber_servant_.
◆ post_read_or_take()
|
protected |
Definition at line 2793 of file DataReaderImpl.cpp.
References DDS::DATA_AVAILABLE_STATUS, and DDS::DATA_ON_READERS_STATUS.
◆ prepare_to_delete()
|
protected |
Definition at line 2410 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::Observer::e_DELETED, and OpenDDS::DCPS::Observer::on_deleted().
◆ process_deadline()
|
private |
Definition at line 3611 of file DataReaderImpl.cpp.
References ACE_GUARD, OpenDDS::DCPS::SubscriptionInstance::cur_sample_tv_, OpenDDS::DCPS::SubscriptionInstance::deadline_, OpenDDS::DCPS::SubscriptionInstance::instance_handle_, OpenDDS::DCPS::SubscriptionInstance::instance_state_, OpenDDS::DCPS::InstanceState::is_exclusive(), CORBA::is_nil(), OpenDDS::DCPS::TimePoint_T< AceClock >::is_zero(), OpenDDS::DCPS::SubscriptionInstance::last_sample_tv_, OpenDDS::DCPS::OwnershipManager::remove_writers(), DDS::REQUESTED_DEADLINE_MISSED_STATUS, and OpenDDS::DCPS::TimePoint_T< MonotonicClock >::zero_value.
◆ process_latency()
| void OpenDDS::DCPS::DataReaderImpl::process_latency | ( | const ReceivedDataSample & | sample | ) |
NB: This message is generated contemporaneously with a similar message from writer_activity(). That message is not marked as an error, so we follow that lead and leave this as an informational message, guarded by debug level. This seems to be due to late samples (samples delivered after an association has been torn down). We may want to promote this to a warning if other conditions causing this symptom are discovered.
Definition at line 2284 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), OpenDDS::DCPS::LogGuid::c_str(), OpenDDS::DCPS::DCPS_debug_level, DDS::DURATION_ZERO_NSEC, DDS::DURATION_ZERO_SEC, OpenDDS::DCPS::ReceivedDataSample::header_, LM_DEBUG, OpenDDS::DCPS::TimePoint_T< SystemClock >::now(), OpenDDS::DCPS::DataSampleHeader::publication_id_, OpenDDS::DCPS::DataSampleHeader::source_timestamp_nanosec_, OpenDDS::DCPS::DataSampleHeader::source_timestamp_sec_, OpenDDS::DCPS::TimeDuration::str(), and timestamp().
Referenced by data_received().
◆ purge_data()
|
protectedpure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by release_instance().
◆ qos_change()
|
protectedvirtual |
Reimplemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Definition at line 882 of file DataReaderImpl.cpp.
References cancel_all_deadlines(), DDS::DataReaderQos::deadline, deadline_period_, deadline_queue_enabled_, DDS::DURATION_INFINITE_NSEC, DDS::DURATION_INFINITE_SEC, DDS::Duration_t::nanosec, DDS::DeadlineQosPolicy::period, qos_, reset_deadline_period(), and DDS::Duration_t::sec.
Referenced by OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >::qos_change(), and set_qos().
◆ raw_latency_buffer_size()
| ACE_INLINE unsigned int & OpenDDS::DCPS::DataReaderImpl::raw_latency_buffer_size | ( | ) |
Configure the size of the raw data collection buffer.
Definition at line 19 of file DataReaderImpl.inl.
References ACE_INLINE, and raw_latency_buffer_size_.
Referenced by OpenDDS::DCPS::SubscriberImpl::create_datareader(), and OpenDDS::DCPS::MultiTopicDataReaderBase::init().
◆ raw_latency_buffer_type()
| ACE_INLINE OpenDDS::DCPS::DataCollector< double >::OnFull & OpenDDS::DCPS::DataReaderImpl::raw_latency_buffer_type | ( | ) |
Configure the type of the raw data collection buffer.
Definition at line 26 of file DataReaderImpl.inl.
References ACE_INLINE, and raw_latency_buffer_type_.
Referenced by OpenDDS::DCPS::SubscriberImpl::create_datareader(), and OpenDDS::DCPS::MultiTopicDataReaderBase::init().
◆ raw_latency_statistics()
| OPENDDS_BEGIN_VERSIONED_NAMESPACE_DECL ACE_INLINE const OpenDDS::DCPS::DataReaderImpl::StatsMapType & OpenDDS::DCPS::DataReaderImpl::raw_latency_statistics | ( | ) | const |
Expose the statistics container.
Definition at line 12 of file DataReaderImpl.inl.
References ACE_INLINE, and statistics_.
◆ read_generic()
|
pure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >, OpenDDS::DCPS::DataReaderImpl_T< MessageType >, OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >, OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by OpenDDS::DCPS::MultiTopicDataReaderBase::data_available().
◆ read_instance_generic()
|
pure virtual |
◆ read_next_instance_generic()
|
pure virtual |
◆ register_for_writer()
|
virtual |
Reimplemented from OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 3254 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::TransportClient::register_for_writer().
◆ reject_coherent()
| void OpenDDS::DCPS::DataReaderImpl::reject_coherent | ( | const GUID_t & | writer_id, |
| const GUID_t & | publisher_id | ||
| ) |
Definition at line 2941 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_GUARD, ACE_TEXT(), OpenDDS::DCPS::DCPS_debug_level, and LM_DEBUG.
◆ release_all_instances()
|
pure virtual |
Release all instances held by the reader.
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
◆ release_instance()
| void OpenDDS::DCPS::DataReaderImpl::release_instance | ( | DDS::InstanceHandle_t | handle | ) |
Release the instance with the handle.
Definition at line 1944 of file DataReaderImpl.cpp.
References ACE_ERROR, ACE_GUARD, get_handle_instance(), instances_, instances_lock_, LM_ERROR, monitor_, ownership_manager(), purge_data(), release_instance_i(), OpenDDS::DCPS::OwnershipManager::remove_writers(), and sample_lock_.
◆ release_instance_i()
|
protectedpure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by release_instance().
◆ remove_all_associations()
| void OpenDDS::DCPS::DataReaderImpl::remove_all_associations | ( | ) |
Definition at line 640 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_READ_GUARD, ACE_TEXT(), DBG_ENTRY_LVL, LM_WARNING, remove_associations(), OpenDDS::DCPS::TransportClient::stop_associating(), OpenDDS::DCPS::TransportClient::transport_stop(), writers_, and writers_lock_.
◆ remove_associations()
|
virtual |
Implements OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 452 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), ACE_WRITE_GUARD, DBG_ENTRY_LVL, OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::Observer::e_DISASSOCIATED, OpenDDS::DCPS::EntityImpl::get_deleted(), get_guid(), OpenDDS::DCPS::EntityImpl::get_observer(), is_bit_, LM_DEBUG, OpenDDS::DCPS::Observer::on_disassociated(), remove_associations_i(), statistics_, statistics_lock_, OpenDDS::DCPS::TransportClient::stop_associating(), and writers_lock_.
Referenced by remove_all_associations().
◆ remove_associations_i()
|
protectedvirtual |
Section 7.1.4.1: total_count will not decrement.
: Reconcile this with the verbiage in section 7.1.4.1
Definition at line 499 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_TEXT(), ACE_WRITE_GUARD, DDS::SubscriptionMatchedStatus::current_count, DDS::SubscriptionMatchedStatus::current_count_change, DBG_ENTRY_LVL, OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::TransportClient::disassociate(), end_historic_sweeper_, get_guid(), is_bit_, CORBA::is_nil(), DDS::SubscriptionMatchedStatus::last_publication_handle, listener_for(), LM_DEBUG, lookup_instance_handles(), monitor_, OpenDDS::DCPS::EntityImpl::notify_status_condition(), notify_subscription_lost(), publication_handle_lock_, publication_id_to_handle_map_, OpenDDS::DCPS::push_back(), resume_sample_processing(), OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), subscription_match_status_, DDS::SUBSCRIPTION_MATCHED_STATUS, DDS::SubscriptionMatchedStatus::total_count_change, writers_, and writers_lock_.
Referenced by remove_associations().
◆ remove_from_lookup_maps()
|
protected |
Definition at line 3561 of file DataReaderImpl.cpp.
◆ reschedule_deadline()
|
private |
Definition at line 3709 of file DataReaderImpl.cpp.
References ACE_GUARD, OpenDDS::DCPS::SubscriptionInstance::deadline_, and OpenDDS::DCPS::TimePoint_T< MonotonicClock >::zero_value.
◆ reset_coherent_info()
| void OpenDDS::DCPS::DataReaderImpl::reset_coherent_info | ( | const GUID_t & | writer_id, |
| const GUID_t & | publisher_id | ||
| ) |
Definition at line 2970 of file DataReaderImpl.cpp.
References ACE_READ_GUARD.
◆ reset_deadline_period()
|
private |
Definition at line 3690 of file DataReaderImpl.cpp.
References ACE_GUARD, OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now(), and OpenDDS::DCPS::TimePoint_T< MonotonicClock >::zero_value.
Referenced by qos_change().
◆ reset_latency_stats()
|
virtual |
Clear any intermediate statistical values.
Implements OpenDDS::DCPS::DataReaderEx.
Definition at line 2386 of file DataReaderImpl.cpp.
◆ reset_ownership()
| void OpenDDS::DCPS::DataReaderImpl::reset_ownership | ( | DDS::InstanceHandle_t | instance | ) |
Definition at line 3163 of file DataReaderImpl.cpp.
References ACE_WRITE_GUARD.
◆ resume_sample_processing()
|
private |
when done handling historic samples, resume
Definition at line 3174 of file DataReaderImpl.cpp.
References ACE_WRITE_GUARD, OpenDDS::DCPS::WriterInfo::check_end_historic_samples(), OpenDDS::DCPS::WriterInfo::finished_delivering_historic(), and OpenDDS::DCPS::OPENDDS_MAP().
Referenced by data_received(), and remove_associations_i().
◆ return_handle()
| void OpenDDS::DCPS::DataReaderImpl::return_handle | ( | DDS::InstanceHandle_t | handle | ) |
Definition at line 2457 of file DataReaderImpl.cpp.
◆ sample_info()
|
protected |
Definition at line 1769 of file DataReaderImpl.cpp.
References DDS::SampleInfo::absolute_generation_rank, DDS::SampleInfo::disposed_generation_count, OpenDDS::DCPS::ReceivedDataElement::disposed_generation_count_, DDS::SampleInfo::generation_rank, OpenDDS::DCPS::SequenceNumber::getValue(), DDS::SampleInfo::no_writers_generation_count, OpenDDS::DCPS::ReceivedDataElement::no_writers_generation_count_, DDS::SampleInfo::opendds_reserved_publication_seq, DDS::SampleInfo::sample_rank, and OpenDDS::DCPS::ReceivedDataElement::sequence_.
◆ schedule_deadline()
|
private |
Definition at line 3577 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::SubscriptionInstance::deadline_, OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now(), and OpenDDS::DCPS::TimePoint_T< MonotonicClock >::zero_value.
◆ set_instance_state()
|
inline |
Definition at line 565 of file DataReaderImpl.h.
References ACE_GUARD, DDS::HANDLE_NIL, instance_states, sample_states, timestamp(), and view_states.
Referenced by OpenDDS::DCPS::MultiTopicDataReaderBase::data_available(), OpenDDS::DCPS::BitSubscriber::remove_connection_record(), OpenDDS::DCPS::StaticParticipant::remove_discovered_participant(), OpenDDS::DCPS::BitSubscriber::remove_i(), and OpenDDS::DCPS::BitSubscriber::remove_thread_status().
◆ set_instance_state_i()
|
privatepure virtual |
◆ set_listener()
|
virtual |
Definition at line 909 of file DataReaderImpl.cpp.
References listener_, listener_mask_, listener_mutex_, and DDS::RETCODE_OK.
Referenced by cleanup(), and init().
◆ set_qos()
|
virtual |
Definition at line 824 of file DataReaderImpl.cpp.
References ACE_ERROR_RETURN, ACE_TEXT(), OpenDDS::DCPS::Qos_Helper::changeable(), OpenDDS::DCPS::Qos_Helper::consistent(), domain_id_, dp_id_, OpenDDS::DCPS::Observer::e_QOS_CHANGED, OpenDDS::DCPS::EntityImpl::enabled_, OpenDDS::DCPS::EntityImpl::get_observer(), get_subscriber_servant(), LM_ERROR, OpenDDS::DCPS::Observer::on_qos_changed(), OPENDDS_NO_DURABILITY_KIND_TRANSIENT_PERSISTENT_COMPATIBILITY_CHECK, OPENDDS_NO_OWNERSHIP_KIND_EXCLUSIVE_COMPATIBILITY_CHECK, OPENDDS_NO_OWNERSHIP_PROFILE_COMPATIBILITY_CHECK, passed_qos_, qos_, qos_change(), DDS::DataReaderQos::representation, DDS::RETCODE_ERROR, DDS::RETCODE_IMMUTABLE_POLICY, DDS::RETCODE_INCONSISTENT_POLICY, DDS::RETCODE_OK, DDS::RETCODE_UNSUPPORTED, OpenDDS::DCPS::WriterInfoListener::subscription_id_, TheServiceParticipant, OpenDDS::DCPS::Qos_Helper::valid(), and DDS::DataRepresentationQosPolicy::value.
◆ set_sample_lost_status()
|
protected |
!!caller should have acquired sample_lock_
Definition at line 2260 of file DataReaderImpl.cpp.
◆ set_sample_rejected_status()
|
protected |
!!caller should have acquired sample_lock_
Definition at line 2268 of file DataReaderImpl.cpp.
◆ set_subscriber_qos()
| void OpenDDS::DCPS::DataReaderImpl::set_subscriber_qos | ( | const DDS::SubscriberQos & | qos | ) |
Definition at line 3116 of file DataReaderImpl.cpp.
◆ setup_deserialization()
|
protected |
Setup deserialization options.
Definition at line 3291 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_ERROR, OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::Encoding::kind_to_string(), OpenDDS::DCPS::Encoding::KIND_UNALIGNED_CDR, OpenDDS::DCPS::Encoding::KIND_XCDR1, LM_DEBUG, LM_ERROR, LM_WARNING, OpenDDS::DCPS::MUTABLE, OPENDDS_STRING, OpenDDS::DCPS::repr_to_encoding_kind(), OpenDDS::DCPS::repr_to_string(), DDS::RETCODE_ERROR, and DDS::RETCODE_OK.
Referenced by enable().
◆ signal_liveliness()
|
virtual |
Implements OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 715 of file DataReaderImpl.cpp.
References ACE_GUARD, ACE_READ_GUARD, OpenDDS::DCPS::GUID_t::entityId, OpenDDS::DCPS::equal_guid_prefixes(), OpenDDS::DCPS::SubscriptionInstance::instance_state_, instances_, instances_lock_, OpenDDS::DCPS::InstanceState::lively(), OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now(), OPENDDS_VECTOR(), sample_lock_, writers_, and writers_lock_.
◆ split_combined_states()
|
inlinestaticprotected |
Definition at line 682 of file DataReaderImpl.h.
◆ state_updated()
| void OpenDDS::DCPS::DataReaderImpl::state_updated | ( | DDS::InstanceHandle_t | handle | ) |
Definition at line 1976 of file DataReaderImpl.cpp.
References ACE_GUARD, sample_lock_, and state_updated_i().
◆ state_updated_i()
|
protectedpure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
Referenced by state_updated().
◆ statistics_enabled() [1/2]
|
virtual |
Definition at line 2397 of file DataReaderImpl.cpp.
◆ statistics_enabled() [2/2]
|
virtual |
Definition at line 2403 of file DataReaderImpl.cpp.
◆ take()
|
pure virtual |
Implemented in OpenDDS::DCPS::DataReaderImpl_T< MessageType >, OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >, OpenDDS::DCPS::DataReaderImpl_T< MessageType >, OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >, OpenDDS::DCPS::DataReaderImpl_T< MessageType >, and OpenDDS::DCPS::DataReaderImpl_T< DynamicSample >.
◆ time_based_filter_instance()
|
protected |
Definition at line 2699 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::TimeDuration::is_zero(), OpenDDS::DCPS::SubscriptionInstance::last_accepted_, and OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now().
◆ to_combined_states()
|
inlinestaticprotected |
Definition at line 670 of file DataReaderImpl.h.
◆ total_samples()
|
protected |
!!caller should have acquired sample_lock_
Definition at line 1800 of file DataReaderImpl.cpp.
References ACE_GUARD_RETURN, instances_, instances_lock_, OpenDDS::DCPS::SubscriptionInstance::rcvd_samples_, and OpenDDS::DCPS::ReceivedDataElementList::size().
◆ transport_assoc_done()
|
virtual |
Reimplemented from OpenDDS::DCPS::TransportClient.
Definition at line 355 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_ERROR, ACE_GUARD, ACE_TEXT(), ACE_WRITE_GUARD, OpenDDS::DCPS::TransportClient::ASSOC_OK, DDS::SubscriptionMatchedStatus::current_count, DDS::SubscriptionMatchedStatus::current_count_change, OpenDDS::DCPS::DCPS_debug_level, get_guid(), is_bit_, CORBA::is_nil(), OpenDDS::DCPS::TimeDuration::is_zero(), DDS::SubscriptionMatchedStatus::last_publication_handle, listener_for(), OpenDDS::DCPS::WriterInfoListener::liveliness_lease_duration_, liveliness_timer_, LM_DEBUG, LM_ERROR, monitor_, OpenDDS::DCPS::EntityImpl::notify_status_condition(), participant_servant_, publication_handle_lock_, publication_id_to_handle_map_, sample_lock_, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), subscription_match_status_, DDS::SUBSCRIPTION_MATCHED_STATUS, DDS::SubscriptionMatchedStatus::total_count, DDS::SubscriptionMatchedStatus::total_count_change, writers_, and writers_lock_.
◆ transport_discovery_change()
|
virtual |
Reimplemented from OpenDDS::DCPS::TransportReceiveListener.
Definition at line 3483 of file DataReaderImpl.cpp.
References TheServiceParticipant.
◆ unregister_for_writer()
|
virtual |
Reimplemented from OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 3264 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::TransportClient::unregister_for_writer().
◆ update_incompatible_qos()
|
virtual |
Implements OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 679 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::IncompatibleQosStatus::count_since_last_send, CORBA::is_nil(), OpenDDS::DCPS::IncompatibleQosStatus::last_policy_id, DDS::RequestedIncompatibleQosStatus::last_policy_id, listener_for(), OpenDDS::DCPS::EntityImpl::notify_status_condition(), OpenDDS::DCPS::IncompatibleQosStatus::policies, DDS::RequestedIncompatibleQosStatus::policies, DDS::REQUESTED_INCOMPATIBLE_QOS_STATUS, requested_incompatible_qos_status_, OpenDDS::DCPS::EntityImpl::set_status_changed_flag(), OpenDDS::DCPS::IncompatibleQosStatus::total_count, DDS::RequestedIncompatibleQosStatus::total_count, and DDS::RequestedIncompatibleQosStatus::total_count_change.
◆ update_locators()
|
virtual |
Reimplemented from OpenDDS::DCPS::DataReaderCallbacks.
Definition at line 3272 of file DataReaderImpl.cpp.
References ACE_READ_GUARD, and OpenDDS::DCPS::TransportClient::update_locators().
◆ update_lookup_maps()
|
protected |
Definition at line 3547 of file DataReaderImpl.cpp.
References instance_states, sample_states, and view_states.
◆ update_ownership_strength()
| void OpenDDS::DCPS::DataReaderImpl::update_ownership_strength | ( | const GUID_t & | pub_id, |
| const CORBA::Long & | ownership_strength | ||
| ) |
Definition at line 2849 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_READ_GUARD, ACE_TEXT(), OpenDDS::DCPS::DCPS_debug_level, and LM_DEBUG.
◆ update_subscription_params()
| void OpenDDS::DCPS::DataReaderImpl::update_subscription_params | ( | const DDS::StringSeq & | params | ) | const |
Definition at line 3152 of file DataReaderImpl.cpp.
References TheServiceParticipant.
◆ verify_coherent_changes_completion()
|
private |
Definition at line 2878 of file DataReaderImpl.cpp.
References OpenDDS::DCPS::WriterInfo::coherent_change_received(), OpenDDS::DCPS::COMPLETED, OpenDDS::DCPS::WriterInfo::group_coherent(), DDS::INSTANCE_PRESENTATION_QOS, OpenDDS::DCPS::NOT_COMPLETED_YET, OpenDDS::DCPS::WriterInfo::publisher_id(), OpenDDS::DCPS::REJECTED, OpenDDS::DCPS::WriterInfo::reset_coherent_info(), state, and OpenDDS::DCPS::WriterInfo::writer_id().
Referenced by data_received().
◆ wait_for_historical_data()
|
virtual |
◆ writer_activity()
| void OpenDDS::DCPS::DataReaderImpl::writer_activity | ( | const DataSampleHeader & | header | ) |
update liveliness info for this writer.
Definition at line 1323 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_READ_GUARD, ACE_TEXT(), OpenDDS::DCPS::WriterInfo::add_coherent_samples(), OpenDDS::DCPS::LogGuid::c_str(), OpenDDS::DCPS::DataSampleHeader::coherent_change_, OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::DISPOSE_INSTANCE, OpenDDS::DCPS::DISPOSE_UNREGISTER_INSTANCE, get_guid(), OpenDDS::DCPS::INSTANCE_REGISTRATION, OpenDDS::DCPS::RcHandle< T >::is_nil(), LM_DEBUG, OpenDDS::DCPS::DataSampleHeader::message_id_, OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now(), OpenDDS::DCPS::DataSampleHeader::publication_id_, OpenDDS::DCPS::WriterInfo::received_activity(), OpenDDS::DCPS::SAMPLE_DATA, OpenDDS::DCPS::DataSampleHeader::sequence_, OpenDDS::DCPS::UNREGISTER_INSTANCE, writers_, and writers_lock_.
Referenced by data_received().
◆ writer_became_alive()
|
virtual |
tell instances when a DataWriter transitions to being alive The writer state is inout parameter, it has to be set ALIVE before handle_timeout is called since some subroutine use the state.
Reimplemented from OpenDDS::DCPS::WriterInfoListener.
Definition at line 2083 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_ERROR, ACE_GUARD, ACE_TEXT(), OpenDDS::DCPS::WriterInfo::ALIVE, OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::WriterInfo::DEAD, OpenDDS::DCPS::WriterInfo::get_state_str(), OpenDDS::DCPS::WriterInfo::handle(), DDS::LIVELINESS_CHANGED_STATUS, LM_DEBUG, LM_ERROR, OpenDDS::DCPS::WriterInfo::state(), and OpenDDS::DCPS::WriterInfo::writer_id().
◆ writer_became_dead()
|
virtual |
tell instances when a DataWriter transitions to DEAD The writer state is inout parameter, the state is set to DEAD when it returns.
Reimplemented from OpenDDS::DCPS::WriterInfoListener.
Definition at line 2153 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_ERROR, ACE_GUARD, ACE_TEXT(), OpenDDS::DCPS::WriterInfo::ALIVE, OpenDDS::DCPS::WriterInfo::clear_owner_evaluated(), OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::WriterInfo::DEAD, OpenDDS::DCPS::WriterInfo::get_state_str(), OpenDDS::DCPS::WriterInfo::handle(), DDS::HANDLE_NIL, DDS::LIVELINESS_CHANGED_STATUS, LM_DEBUG, LM_ERROR, OpenDDS::DCPS::OwnershipManager::remove_writer(), OpenDDS::DCPS::WriterInfo::state(), and OpenDDS::DCPS::WriterInfo::writer_id().
◆ writer_removed()
|
virtual |
tell instance when a DataWriter is removed. The liveliness status need update.
Reimplemented from OpenDDS::DCPS::WriterInfoListener.
Definition at line 2024 of file DataReaderImpl.cpp.
References ACE_DEBUG, ACE_GUARD, ACE_TEXT(), OpenDDS::DCPS::WriterInfo::ALIVE, OpenDDS::DCPS::WriterInfo::clear_owner_evaluated(), OpenDDS::DCPS::DCPS_debug_level, OpenDDS::DCPS::WriterInfo::DEAD, OpenDDS::DCPS::WriterInfo::handle(), DDS::HANDLE_NIL, DDS::LIVELINESS_CHANGED_STATUS, LM_DEBUG, OpenDDS::DCPS::OwnershipManager::remove_writer(), OpenDDS::DCPS::WriterInfo::state(), and OpenDDS::DCPS::WriterInfo::writer_id().
Friends And Related Function Documentation
◆ ::DDS_TEST
|
friend |
Definition at line 870 of file DataReaderImpl.h.
◆ EndHistoricSamplesMissedSweeper
|
friend |
Definition at line 868 of file DataReaderImpl.h.
◆ InstanceState
|
friend |
Definition at line 867 of file DataReaderImpl.h.
◆ OwnershipManagerPtr
|
friend |
Definition at line 481 of file DataReaderImpl.h.
◆ QueryConditionImpl
|
friend |
Definition at line 216 of file DataReaderImpl.h.
Referenced by create_querycondition().
◆ RequestedDeadlineWatchdog
|
friend |
Definition at line 215 of file DataReaderImpl.h.
◆ SubscriberImpl
|
friend |
Definition at line 217 of file DataReaderImpl.h.
Member Data Documentation
◆ always_get_history_
|
private |
Definition at line 1013 of file DataReaderImpl.h.
◆ budget_exceeded_status_
|
private |
Definition at line 900 of file DataReaderImpl.h.
Referenced by DataReaderImpl().
◆ coherent_
|
protected |
Is accessing to Group coherent changes ?
Definition at line 805 of file DataReaderImpl.h.
◆ COMBINED_SAMPLE_STATE_SHIFT
|
staticprotected |
Definition at line 665 of file DataReaderImpl.h.
◆ combined_state_lookup_
|
protected |
Definition at line 694 of file DataReaderImpl.h.
◆ COMBINED_VIEW_STATE_SHIFT
|
staticprotected |
Definition at line 664 of file DataReaderImpl.h.
◆ content_filtered_topic_
|
protected |
Definition at line 797 of file DataReaderImpl.h.
Referenced by cleanup(), enable(), and get_topicdescription().
◆ content_filtered_topic_mutex_
|
mutableprotected |
Definition at line 796 of file DataReaderImpl.h.
Referenced by cleanup(), enable(), and get_topicdescription().
◆ deadline_period_
|
private |
Watchdog responsible for reporting missed offered deadlines.
Definition at line 990 of file DataReaderImpl.h.
Referenced by enable(), and qos_change().
◆ deadline_queue_
|
private |
Definition at line 992 of file DataReaderImpl.h.
◆ deadline_queue_enabled_
|
private |
Definition at line 993 of file DataReaderImpl.h.
Referenced by data_received(), enable(), and qos_change().
◆ deadline_task_
|
private |
Definition at line 995 of file DataReaderImpl.h.
Referenced by ~DataReaderImpl().
◆ decoding_modes_
|
protected |
Definition at line 1051 of file DataReaderImpl.h.
◆ depth_
|
private |
Definition at line 884 of file DataReaderImpl.h.
Referenced by enable().
◆ domain_id_
|
private |
Definition at line 876 of file DataReaderImpl.h.
◆ dp_id_
|
private |
Definition at line 877 of file DataReaderImpl.h.
◆ dynamic_type_
|
protected |
Definition at line 1105 of file DataReaderImpl.h.
Referenced by enable().
◆ end_historic_sweeper_
|
private |
Definition at line 882 of file DataReaderImpl.h.
Referenced by remove_associations_i().
◆ group_coherent_ordered_data_
|
protected |
Ordered group samples.
Definition at line 808 of file DataReaderImpl.h.
◆ has_subscription_id_
|
protected |
Definition at line 767 of file DataReaderImpl.h.
Referenced by add_association(), and enable().
◆ instances_
|
mutableprotected |
: document why the instances_ container is mutable.
Definition at line 738 of file DataReaderImpl.h.
Referenced by data_received(), release_instance(), signal_liveliness(), and total_samples().
◆ instances_lock_
|
mutableprotected |
Assume since the container is mutable(?!!?) it may need to use the lock while const. : remove the recursive nature of the instances_lock if not needed.
Definition at line 743 of file DataReaderImpl.h.
Referenced by contains_sample(), data_received(), have_instance_states(), have_sample_states(), have_view_states(), release_instance(), signal_liveliness(), and total_samples().
◆ is_bit_
|
private |
Flag indicates that this datareader is a builtin topic datareader.
Definition at line 1011 of file DataReaderImpl.h.
Referenced by add_association(), init(), remove_associations(), remove_associations_i(), and transport_assoc_done().
◆ is_exclusive_ownership_
|
protected |
Definition at line 791 of file DataReaderImpl.h.
Referenced by data_received(), and init().
◆ last_deadline_missed_total_count_
|
private |
Definition at line 987 of file DataReaderImpl.h.
Referenced by get_requested_deadline_missed_status().
◆ listener_
|
private |
Definition at line 875 of file DataReaderImpl.h.
Referenced by get_ext_listener(), get_listener(), listener_for(), and set_listener().
◆ listener_mask_
|
private |
Definition at line 874 of file DataReaderImpl.h.
Referenced by listener_for(), and set_listener().
◆ listener_mutex_
|
private |
Definition at line 873 of file DataReaderImpl.h.
Referenced by get_ext_listener(), get_listener(), listener_for(), and set_listener().
◆ liveliness_changed_status_
|
private |
Definition at line 894 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), and get_liveliness_changed_status().
◆ liveliness_timer_
|
private |
Definition at line 985 of file DataReaderImpl.h.
Referenced by transport_assoc_done().
◆ MAX_INSTANCE_STATE_BITS
|
staticprotected |
Definition at line 661 of file DataReaderImpl.h.
◆ MAX_INSTANCE_STATE_FLAG
|
staticprotected |
Definition at line 659 of file DataReaderImpl.h.
◆ MAX_INSTANCE_STATE_MASK
|
staticprotected |
Definition at line 660 of file DataReaderImpl.h.
◆ MAX_SAMPLE_STATE_BITS
|
staticprotected |
Definition at line 651 of file DataReaderImpl.h.
◆ MAX_SAMPLE_STATE_FLAG
|
staticprotected |
Definition at line 649 of file DataReaderImpl.h.
◆ MAX_SAMPLE_STATE_MASK
|
staticprotected |
Definition at line 650 of file DataReaderImpl.h.
◆ MAX_VIEW_STATE_BITS
|
staticprotected |
Definition at line 656 of file DataReaderImpl.h.
◆ MAX_VIEW_STATE_FLAG
|
staticprotected |
Definition at line 654 of file DataReaderImpl.h.
◆ MAX_VIEW_STATE_MASK
|
staticprotected |
Definition at line 655 of file DataReaderImpl.h.
◆ mb_alloc_
|
protected |
Definition at line 1108 of file DataReaderImpl.h.
Referenced by data_received().
◆ monitor_
|
private |
Monitor object for this entity.
Definition at line 1042 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), enable(), release_instance(), remove_associations_i(), and transport_assoc_done().
◆ multi_topic_
|
protected |
Definition at line 801 of file DataReaderImpl.h.
Referenced by cleanup().
◆ n_chunks_
|
private |
Definition at line 885 of file DataReaderImpl.h.
Referenced by enable().
◆ participant_servant_
|
protected |
Definition at line 785 of file DataReaderImpl.h.
Referenced by enable(), get_instance_handle(), get_matched_publication_data(), init(), transport_assoc_done(), and ~DataReaderImpl().
◆ passed_qos_
|
protected |
Definition at line 773 of file DataReaderImpl.h.
◆ periodic_monitor_
|
private |
Periodic Monitor object for this entity.
Definition at line 1045 of file DataReaderImpl.h.
Referenced by DataReaderImpl().
◆ publication_handle_lock_
|
private |
Definition at line 888 of file DataReaderImpl.h.
Referenced by data_received(), get_matched_publications(), get_requested_incompatible_qos_status(), get_subscription_matched_status(), remove_associations_i(), and transport_assoc_done().
◆ publication_id_to_handle_map_
|
private |
Definition at line 891 of file DataReaderImpl.h.
Referenced by data_received(), get_matched_publications(), remove_associations_i(), and transport_assoc_done().
◆ qos_
|
protected |
Definition at line 772 of file DataReaderImpl.h.
Referenced by add_association(), check_transport_qos(), enable(), init(), qos_change(), and set_qos().
◆ raw_latency_buffer_size_
|
private |
Bound (or initial reservation) of raw latency buffer.
Definition at line 1032 of file DataReaderImpl.h.
Referenced by add_association(), and raw_latency_buffer_size().
◆ raw_latency_buffer_type_
|
private |
Type of raw latency data buffer.
Definition at line 1035 of file DataReaderImpl.h.
Referenced by add_association(), and raw_latency_buffer_type().
◆ rd_allocator_
|
protected |
Definition at line 771 of file DataReaderImpl.h.
Referenced by enable().
◆ reactor_
|
private |
The orb's reactor to be used to register the liveliness timer.
Definition at line 916 of file DataReaderImpl.h.
Referenced by DataReaderImpl().
◆ read_conditions_
|
private |
Definition at line 1039 of file DataReaderImpl.h.
Referenced by create_querycondition(), create_readcondition(), delete_contained_entities(), delete_readcondition(), has_readcondition(), and notify_read_conditions().
◆ requested_deadline_missed_status_
|
private |
Definition at line 895 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), and get_requested_deadline_missed_status().
◆ requested_incompatible_qos_status_
|
private |
Definition at line 896 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), get_requested_incompatible_qos_status(), and update_incompatible_qos().
◆ reverse_sample_lock_
|
protected |
Definition at line 783 of file DataReaderImpl.h.
Referenced by notify_read_conditions().
◆ sample_lock_
|
protected |
lock protecting sample container as well as statuses.
Definition at line 780 of file DataReaderImpl.h.
Referenced by contains_sample(), create_querycondition(), create_readcondition(), data_received(), delete_contained_entities(), delete_readcondition(), enable(), get_liveliness_changed_status(), get_requested_deadline_missed_status(), get_sample_lost_status(), get_sample_rejected_status(), OpenDDS::DCPS::QueryConditionImpl::get_trigger_value(), release_instance(), signal_liveliness(), state_updated(), and transport_assoc_done().
◆ sample_lost_status_
|
protected |
Definition at line 777 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), and get_sample_lost_status().
◆ sample_rejected_status_
|
protected |
Definition at line 776 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), and get_sample_rejected_status().
◆ security_config_
|
protected |
Definition at line 1104 of file DataReaderImpl.h.
Referenced by enable().
◆ statistics_
|
private |
Statistics for this reader, collected for each writer.
Definition at line 1028 of file DataReaderImpl.h.
Referenced by add_association(), raw_latency_statistics(), and remove_associations().
◆ statistics_enabled_
|
private |
Flag indicating status of statistics gathering.
Definition at line 1016 of file DataReaderImpl.h.
◆ statistics_lock_
|
private |
Definition at line 1029 of file DataReaderImpl.h.
Referenced by add_association(), and remove_associations().
◆ subqos_
|
protected |
Definition at line 810 of file DataReaderImpl.h.
◆ subscriber_servant_
|
private |
Definition at line 881 of file DataReaderImpl.h.
Referenced by get_subscriber_servant(), init(), and parent().
◆ subscription_id_condition_
|
mutableprotected |
Definition at line 769 of file DataReaderImpl.h.
Referenced by add_association(), and enable().
◆ subscription_id_mutex_
|
mutableprotected |
Definition at line 768 of file DataReaderImpl.h.
Referenced by add_association(), and enable().
◆ subscription_lost_status_
|
private |
- Todo:
- The subscription_lost_status_ and subscription_reconnecting_status_ are left here for future use when we add get_subscription_lost_status() and get_subscription_reconnecting_status() methods.
Definition at line 909 of file DataReaderImpl.h.
◆ subscription_match_status_
|
private |
Definition at line 897 of file DataReaderImpl.h.
Referenced by DataReaderImpl(), get_subscription_matched_status(), remove_associations_i(), and transport_assoc_done().
◆ topic_desc_
|
private |
Definition at line 872 of file DataReaderImpl.h.
Referenced by get_topicdescription(), and init().
◆ topic_id_
|
protected |
Definition at line 788 of file DataReaderImpl.h.
Referenced by init().
◆ topic_servant_
|
protected |
Definition at line 786 of file DataReaderImpl.h.
◆ transport_disabled_
|
private |
Definition at line 1047 of file DataReaderImpl.h.
Referenced by disable_transport(), and enable().
◆ type_support_
|
protected |
Definition at line 787 of file DataReaderImpl.h.
Referenced by init().
◆ writers_
|
private |
Definition at line 1022 of file DataReaderImpl.h.
Referenced by add_association(), data_received(), remove_all_associations(), remove_associations_i(), signal_liveliness(), transport_assoc_done(), and writer_activity().
◆ writers_lock_
|
private |
RW lock for reading/writing publications.
Definition at line 1025 of file DataReaderImpl.h.
Referenced by add_association(), data_received(), remove_all_associations(), remove_associations(), remove_associations_i(), signal_liveliness(), transport_assoc_done(), and writer_activity().
The documentation for this class was generated from the following files:
