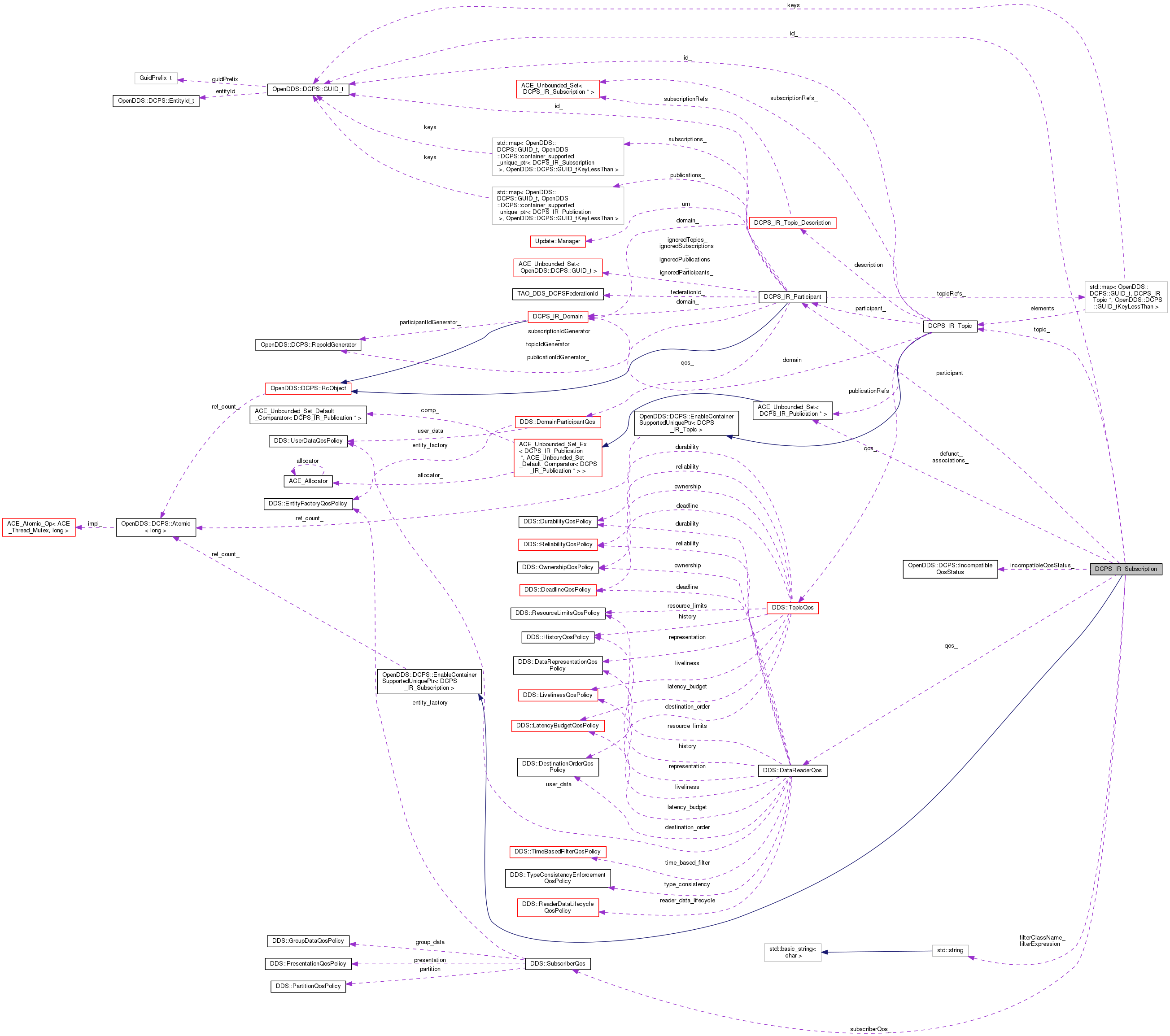
Representative of a Subscription. More...
#include <DCPS_IR_Subscription.h>
Private Attributes | |
| OpenDDS::DCPS::GUID_t | id_ |
| DCPS_IR_Participant * | participant_ |
| DCPS_IR_Topic * | topic_ |
| DDS::InstanceHandle_t | handle_ |
| CORBA::Boolean | isBIT_ |
| OpenDDS::DCPS::DataReaderRemote_var | reader_ |
| the corresponding DataReaderRemote object More... | |
| DDS::DataReaderQos | qos_ |
| OpenDDS::DCPS::TransportLocatorSeq | info_ |
| ACE_CDR::ULong | transportContext_ |
| DDS::SubscriberQos | subscriberQos_ |
| std::string | filterClassName_ |
| std::string | filterExpression_ |
| DDS::StringSeq | exprParams_ |
| DDS::OctetSeq | serializedTypeInfo_ |
| DCPS_IR_Publication_Set | associations_ |
| DCPS_IR_Publication_Set | defunct_ |
| OpenDDS::DCPS::IncompatibleQosStatus | incompatibleQosStatus_ |
Additional Inherited Members | |
 Protected Member Functions inherited from OpenDDS::DCPS::EnableContainerSupportedUniquePtr< DCPS_IR_Subscription > Protected Member Functions inherited from OpenDDS::DCPS::EnableContainerSupportedUniquePtr< DCPS_IR_Subscription > | |
| EnableContainerSupportedUniquePtr () | |
| void | _add_ref () |
| void | _remove_ref () |
| long | ref_count () const |
Detailed Description
Representative of a Subscription.
Definition at line 41 of file DCPS_IR_Subscription.h.
Constructor & Destructor Documentation
◆ DCPS_IR_Subscription()
| OPENDDS_BEGIN_VERSIONED_NAMESPACE_DECL DCPS_IR_Subscription::DCPS_IR_Subscription | ( | const OpenDDS::DCPS::GUID_t & | id, |
| DCPS_IR_Participant * | participant, | ||
| DCPS_IR_Topic * | topic, | ||
| OpenDDS::DCPS::DataReaderRemote_ptr | reader, | ||
| const DDS::DataReaderQos & | qos, | ||
| const OpenDDS::DCPS::TransportLocatorSeq & | info, | ||
| ACE_CDR::ULong | transportContext, | ||
| const DDS::SubscriberQos & | subscriberQos, | ||
| const char * | filterClassName, | ||
| const char * | filterExpression, | ||
| const DDS::StringSeq & | exprParams, | ||
| const DDS::OctetSeq & | serializedTypeInfo | ||
| ) |
Definition at line 25 of file DCPS_IR_Subscription.cpp.
References OpenDDS::DCPS::IncompatibleQosStatus::count_since_last_send, incompatibleQosStatus_, reader_, and OpenDDS::DCPS::IncompatibleQosStatus::total_count.
◆ ~DCPS_IR_Subscription()
| DCPS_IR_Subscription::~DCPS_IR_Subscription | ( | ) |
Definition at line 57 of file DCPS_IR_Subscription.cpp.
Member Function Documentation
◆ add_associated_publication()
| int DCPS_IR_Subscription::add_associated_publication | ( | DCPS_IR_Publication * | pub, |
| bool | active | ||
| ) |
Associate with the publication Adds the publication to the list of associated publications and notifies datareader if successfully added This method can mark the participant dead Returns 0 if added, 1 if already exists, -1 other failure
Definition at line 61 of file DCPS_IR_Subscription.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, ACE_ERROR, ACE_TEXT(), associations_, OpenDDS::DCPS::DCPS_debug_level, DCPS_IR_Publication::get_datawriter_qos(), DCPS_IR_Publication::get_id(), DCPS_IR_Publication::get_publisher_qos(), DCPS_IR_Publication::get_serialized_type_info(), DCPS_IR_Publication::get_transportContext(), DCPS_IR_Publication::get_transportLocatorSeq(), id_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::insert(), DCPS_IR_Participant::is_alive(), DCPS_IR_Participant::isOwner(), LM_DEBUG, LM_ERROR, DCPS_IR_Participant::mark_dead(), participant_, OpenDDS::DCPS::WriterAssociation::pubQos, reader_, OpenDDS::DCPS::WriterAssociation::serializedTypeInfo, OpenDDS::DCPS::WriterAssociation::transportContext, OpenDDS::DCPS::WriterAssociation::writerId, OpenDDS::DCPS::WriterAssociation::writerQos, and OpenDDS::DCPS::WriterAssociation::writerTransInfo.
Referenced by DCPS_IR_Topic_Description::associate().
◆ disassociate_participant()
| void DCPS_IR_Subscription::disassociate_participant | ( | OpenDDS::DCPS::GUID_t | id, |
| bool | reassociate = false |
||
| ) |
Remove any publications whose participant has the id.
Definition at line 236 of file DCPS_IR_Subscription.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, ACE_ERROR, ACE_TEXT(), associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), OpenDDS::DCPS::DCPS_debug_level, defunct_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), DCPS_IR_Publication::get_id(), DCPS_IR_Publication::get_participant_id(), id_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::insert(), DCPS_IR_Participant::is_alive(), DCPS_IR_Participant::isOwner(), LM_DEBUG, LM_ERROR, DCPS_IR_Participant::mark_dead(), participant_, reader_, remove_associated_publication(), DCPS_IR_Publication::remove_associated_subscription(), send(), and ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::size().
◆ disassociate_publication()
| void DCPS_IR_Subscription::disassociate_publication | ( | OpenDDS::DCPS::GUID_t | id, |
| bool | reassociate = false |
||
| ) |
Remove any publications with id.
Definition at line 376 of file DCPS_IR_Subscription.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, ACE_ERROR, ACE_TEXT(), associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), OpenDDS::DCPS::DCPS_debug_level, defunct_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), DCPS_IR_Publication::get_id(), id_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::insert(), DCPS_IR_Participant::is_alive(), DCPS_IR_Participant::isOwner(), LM_DEBUG, LM_ERROR, DCPS_IR_Participant::mark_dead(), participant_, reader_, remove_associated_publication(), DCPS_IR_Publication::remove_associated_subscription(), send(), and ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::size().
Referenced by TAO_DDS_DCPSInfo_i::disassociate_subscription().
◆ disassociate_topic()
| void DCPS_IR_Subscription::disassociate_topic | ( | OpenDDS::DCPS::GUID_t | id | ) |
Remove any publications whose topic has the id.
Definition at line 312 of file DCPS_IR_Subscription.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, ACE_TEXT(), associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), OpenDDS::DCPS::DCPS_debug_level, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), DCPS_IR_Publication::get_id(), DCPS_IR_Publication::get_topic_id(), id_, DCPS_IR_Participant::is_alive(), DCPS_IR_Participant::isOwner(), LM_DEBUG, DCPS_IR_Participant::mark_dead(), participant_, reader_, remove_associated_publication(), DCPS_IR_Publication::remove_associated_subscription(), send(), and ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::size().
◆ dump_to_string()
| std::string DCPS_IR_Subscription::dump_to_string | ( | const std::string & | prefix, |
| int | depth | ||
| ) | const |
Definition at line 748 of file DCPS_IR_Subscription.cpp.
References associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), defunct_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), id_, and isBIT_.
◆ get_datareader_qos()
| const DDS::DataReaderQos * DCPS_IR_Subscription::get_datareader_qos | ( | ) |
Return pointer to the DataReader qos Subscription retains ownership
Definition at line 488 of file DCPS_IR_Subscription.cpp.
References qos_.
Referenced by DCPS_IR_Publication::add_associated_subscription(), DCPS_IR_Domain::publish_subscription_bit(), OpenDDS::Federator::ManagerImpl::pushState(), reevaluate_association(), DCPS_IR_Publication::reevaluate_association(), and DCPS_IR_Topic_Description::try_associate().
◆ get_expr_params()
| DDS::StringSeq DCPS_IR_Subscription::get_expr_params | ( | ) | const |
Definition at line 732 of file DCPS_IR_Subscription.cpp.
References exprParams_.
Referenced by DCPS_IR_Publication::add_associated_subscription(), and OpenDDS::Federator::ManagerImpl::pushState().
◆ get_filter_class_name()
| std::string DCPS_IR_Subscription::get_filter_class_name | ( | ) | const |
Definition at line 720 of file DCPS_IR_Subscription.cpp.
References filterClassName_.
Referenced by DCPS_IR_Publication::add_associated_subscription().
◆ get_filter_expression()
| std::string DCPS_IR_Subscription::get_filter_expression | ( | ) | const |
Definition at line 726 of file DCPS_IR_Subscription.cpp.
References filterExpression_.
Referenced by DCPS_IR_Publication::add_associated_subscription(), and OpenDDS::Federator::ManagerImpl::pushState().
◆ get_handle()
| DDS::InstanceHandle_t DCPS_IR_Subscription::get_handle | ( | void | ) |
Definition at line 693 of file DCPS_IR_Subscription.cpp.
References handle_.
Referenced by DCPS_IR_Domain::dispose_subscription_bit().
◆ get_id()
| OpenDDS::DCPS::GUID_t DCPS_IR_Subscription::get_id | ( | void | ) |
Definition at line 668 of file DCPS_IR_Subscription.cpp.
References id_.
Referenced by DCPS_IR_Publication::add_associated_subscription(), DCPS_IR_Participant::add_subscription(), DCPS_IR_Topic_Description::add_subscription_reference(), DCPS_IR_Topic::add_subscription_reference(), DCPS_IR_Topic_Description::associate(), DCPS_IR_Publication::disassociate_participant(), DCPS_IR_Publication::disassociate_subscription(), DCPS_IR_Publication::disassociate_topic(), DCPS_IR_Domain::publish_subscription_bit(), OpenDDS::Federator::ManagerImpl::pushState(), DCPS_IR_Publication::reevaluate_defunct_associations(), DCPS_IR_Publication::remove_associated_subscription(), DCPS_IR_Topic_Description::remove_subscription_reference(), DCPS_IR_Topic::remove_subscription_reference(), DCPS_IR_Topic_Description::try_associate(), DCPS_IR_Topic::try_associate(), and DCPS_IR_Topic_Description::try_associate_subscription().
◆ get_incompatibleQosStatus()
| OpenDDS::DCPS::IncompatibleQosStatus * DCPS_IR_Subscription::get_incompatibleQosStatus | ( | ) |
Return pointer to the incompatible qos status Subscription retains ownership
Definition at line 483 of file DCPS_IR_Subscription.cpp.
References incompatibleQosStatus_.
Referenced by reevaluate_association(), DCPS_IR_Publication::reevaluate_association(), DCPS_IR_Topic_Description::try_associate(), DCPS_IR_Topic_Description::try_associate_publication(), and DCPS_IR_Topic_Description::try_associate_subscription().
◆ get_participant_id()
| OpenDDS::DCPS::GUID_t DCPS_IR_Subscription::get_participant_id | ( | ) |
Definition at line 678 of file DCPS_IR_Subscription.cpp.
References DCPS_IR_Participant::get_id(), and participant_.
Referenced by DCPS_IR_Publication::disassociate_participant(), DCPS_IR_Domain::publish_subscription_bit(), OpenDDS::Federator::ManagerImpl::pushState(), DCPS_IR_Topic_Description::try_associate(), and DCPS_IR_Topic::try_associate().
◆ get_serialized_type_info()
| const DDS::OctetSeq & DCPS_IR_Subscription::get_serialized_type_info | ( | ) | const |
Definition at line 791 of file DCPS_IR_Subscription.cpp.
References OPENDDS_END_VERSIONED_NAMESPACE_DECL, and serializedTypeInfo_.
Referenced by DCPS_IR_Publication::add_associated_subscription().
◆ get_subscriber_qos()
| const DDS::SubscriberQos * DCPS_IR_Subscription::get_subscriber_qos | ( | ) |
Return pointer to the Subscriber qos Subscription retains ownership
Definition at line 493 of file DCPS_IR_Subscription.cpp.
References subscriberQos_.
Referenced by DCPS_IR_Publication::add_associated_subscription(), DCPS_IR_Domain::publish_subscription_bit(), OpenDDS::Federator::ManagerImpl::pushState(), reevaluate_association(), DCPS_IR_Publication::reevaluate_association(), and DCPS_IR_Topic_Description::try_associate().
◆ get_topic()
| DCPS_IR_Topic * DCPS_IR_Subscription::get_topic | ( | ) |
Definition at line 688 of file DCPS_IR_Subscription.cpp.
References topic_.
Referenced by DCPS_IR_Domain::publish_subscription_bit().
◆ get_topic_description()
| DCPS_IR_Topic_Description * DCPS_IR_Subscription::get_topic_description | ( | ) |
Definition at line 683 of file DCPS_IR_Subscription.cpp.
References DCPS_IR_Topic::get_topic_description(), and topic_.
Referenced by DCPS_IR_Domain::publish_subscription_bit().
◆ get_topic_id()
| OpenDDS::DCPS::GUID_t DCPS_IR_Subscription::get_topic_id | ( | ) |
Definition at line 673 of file DCPS_IR_Subscription.cpp.
References DCPS_IR_Topic::get_id(), and topic_.
Referenced by DCPS_IR_Publication::disassociate_topic(), OpenDDS::Federator::ManagerImpl::pushState(), DCPS_IR_Topic_Description::try_associate(), and DCPS_IR_Topic::try_associate().
◆ get_transportContext()
|
inline |
Definition at line 150 of file DCPS_IR_Subscription.h.
References get_handle().
Referenced by DCPS_IR_Publication::add_associated_subscription().
◆ get_transportLocatorSeq()
| OpenDDS::DCPS::TransportLocatorSeq DCPS_IR_Subscription::get_transportLocatorSeq | ( | ) | const |
Definition at line 478 of file DCPS_IR_Subscription.cpp.
References info_.
Referenced by DCPS_IR_Publication::add_associated_subscription(), OpenDDS::Federator::ManagerImpl::pushState(), reevaluate_association(), DCPS_IR_Publication::reevaluate_association(), and DCPS_IR_Topic_Description::try_associate().
◆ is_bit()
| CORBA::Boolean DCPS_IR_Subscription::is_bit | ( | ) |
Definition at line 703 of file DCPS_IR_Subscription.cpp.
References isBIT_.
Referenced by DCPS_IR_Domain::dispose_subscription_bit().
◆ is_publication_ignored()
| CORBA::Boolean DCPS_IR_Subscription::is_publication_ignored | ( | OpenDDS::DCPS::GUID_t | partId, |
| OpenDDS::DCPS::GUID_t | topicId, | ||
| OpenDDS::DCPS::GUID_t | pubId | ||
| ) |
Check that none of the ids given are ones that this subscription should ignore. returns 1 if one of these ids is an ignored id
Definition at line 467 of file DCPS_IR_Subscription.cpp.
References DCPS_IR_Participant::is_participant_ignored(), DCPS_IR_Participant::is_publication_ignored(), DCPS_IR_Participant::is_topic_ignored(), and participant_.
Referenced by DCPS_IR_Topic_Description::try_associate().
◆ reader()
| OpenDDS::DCPS::DataReaderRemote_ptr DCPS_IR_Subscription::reader | ( | void | ) |
Definition at line 714 of file DCPS_IR_Subscription.cpp.
References reader_.
Referenced by OpenDDS::Federator::ManagerImpl::pushState().
◆ reevaluate_association()
| bool DCPS_IR_Subscription::reevaluate_association | ( | DCPS_IR_Publication * | publication | ) |
Definition at line 639 of file DCPS_IR_Subscription.cpp.
References associations_, OpenDDS::DCPS::compatibleQOS(), ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::find(), get_datareader_qos(), DCPS_IR_Publication::get_datawriter_qos(), DCPS_IR_Publication::get_incompatibleQosStatus(), get_incompatibleQosStatus(), DCPS_IR_Publication::get_publisher_qos(), get_subscriber_qos(), DCPS_IR_Topic::get_topic_description(), DCPS_IR_Publication::get_transportLocatorSeq(), get_transportLocatorSeq(), remove_associated_publication(), topic_, and DCPS_IR_Topic_Description::try_associate().
Referenced by DCPS_IR_Topic::reevaluate_associations(), DCPS_IR_Topic_Description::reevaluate_associations(), reevaluate_defunct_associations(), and reevaluate_existing_associations().
◆ reevaluate_defunct_associations()
| void DCPS_IR_Subscription::reevaluate_defunct_associations | ( | ) |
Definition at line 601 of file DCPS_IR_Subscription.cpp.
References ACE_ERROR, ACE_TEXT(), ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), defunct_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), DCPS_IR_Publication::get_id(), id_, LM_ERROR, reevaluate_association(), and ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::remove().
◆ reevaluate_existing_associations()
| void DCPS_IR_Subscription::reevaluate_existing_associations | ( | ) |
Definition at line 624 of file DCPS_IR_Subscription.cpp.
References associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), and reevaluate_association().
Referenced by set_qos().
◆ remove_associated_publication()
| int DCPS_IR_Subscription::remove_associated_publication | ( | DCPS_IR_Publication * | pub, |
| CORBA::Boolean | sendNotify, | ||
| CORBA::Boolean | notify_lost, | ||
| bool | notify_both_side = false |
||
| ) |
Remove the associated publication Removes the publication from the list of associated publications if return successful sendNotify indicates whether to tell the datareader about removing the publication The notify_lost flag true indicates this remove_associations is called when the InfoRepo detects this subscription is lost because of the failure of invocation on this subscription. The notify_both_side parameter indicates if it needs call pub to remove association as well. This method can mark the participant dead Returns 0 if successful
Definition at line 133 of file DCPS_IR_Subscription.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, ACE_ERROR, ACE_TEXT(), associations_, OpenDDS::DCPS::DCPS_debug_level, DCPS_IR_Publication::get_id(), id_, DCPS_IR_Participant::is_alive(), DCPS_IR_Participant::isOwner(), LM_DEBUG, LM_ERROR, DCPS_IR_Participant::mark_dead(), participant_, reader_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::remove(), and DCPS_IR_Publication::remove_associated_subscription().
Referenced by DCPS_IR_Publication::disassociate_participant(), disassociate_participant(), disassociate_publication(), DCPS_IR_Publication::disassociate_subscription(), DCPS_IR_Publication::disassociate_topic(), disassociate_topic(), reevaluate_association(), DCPS_IR_Publication::remove_associated_subscription(), DCPS_IR_Publication::remove_associations(), and remove_associations().
◆ remove_associations()
| int DCPS_IR_Subscription::remove_associations | ( | CORBA::Boolean | notify_lost | ) |
Removes all the associated publications This method can mark the participant dead The notify_lost flag true indicates this remove_associations is called when the InfoRepo detects this subscription is lost because of the failure of invocation on this subscription. Returns 0 if successful
Definition at line 210 of file DCPS_IR_Subscription.cpp.
References associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), defunct_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), remove_associated_publication(), DCPS_IR_Publication::remove_associated_subscription(), ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::reset(), send(), and ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::size().
◆ set_bit_status()
| void DCPS_IR_Subscription::set_bit_status | ( | CORBA::Boolean | isBIT | ) |
Definition at line 708 of file DCPS_IR_Subscription.cpp.
References isBIT_.
Referenced by DCPS_IR_Participant::add_subscription(), and DCPS_IR_Domain::publish_subscription_bit().
◆ set_handle()
| void DCPS_IR_Subscription::set_handle | ( | DDS::InstanceHandle_t | handle | ) |
Definition at line 698 of file DCPS_IR_Subscription.cpp.
References handle_.
Referenced by DCPS_IR_Domain::publish_subscription_bit().
◆ set_qos() [1/3]
| bool DCPS_IR_Subscription::set_qos | ( | const DDS::DataReaderQos & | qos, |
| const DDS::SubscriberQos & | subscriberQos, | ||
| Update::SpecificQos & | specificQos | ||
| ) |
Update the DataReader or Subscriber qos and also publish the qos changes to datereader BIT.
Definition at line 559 of file DCPS_IR_Subscription.cpp.
References Update::DataReaderQos, DCPS_IR_Participant::get_domain_reference(), DCPS_IR_Topic::get_topic_description(), Update::NoQos, participant_, DCPS_IR_Domain::publish_subscription_bit(), qos_, DCPS_IR_Topic_Description::reevaluate_associations(), reevaluate_existing_associations(), OpenDDS::DCPS::should_check_association_upon_change(), Update::SubscriberQos, subscriberQos_, and topic_.
Referenced by TAO_DDS_DCPSInfo_i::update_subscription_qos().
◆ set_qos() [2/3]
| void DCPS_IR_Subscription::set_qos | ( | const DDS::DataReaderQos & | qos | ) |
Update DataReaderQos only.
Definition at line 501 of file DCPS_IR_Subscription.cpp.
References DCPS_IR_Participant::get_domain_reference(), DCPS_IR_Topic::get_topic_description(), participant_, DCPS_IR_Domain::publish_subscription_bit(), qos_, DCPS_IR_Topic_Description::reevaluate_associations(), reevaluate_existing_associations(), OpenDDS::DCPS::should_check_association_upon_change(), ACE_OS::sleep(), and topic_.
◆ set_qos() [3/3]
| void DCPS_IR_Subscription::set_qos | ( | const DDS::SubscriberQos & | qos | ) |
Update SubscriberQos only.
Definition at line 531 of file DCPS_IR_Subscription.cpp.
References DCPS_IR_Participant::get_domain_reference(), DCPS_IR_Topic::get_topic_description(), participant_, DCPS_IR_Domain::publish_subscription_bit(), DCPS_IR_Topic_Description::reevaluate_associations(), reevaluate_existing_associations(), OpenDDS::DCPS::should_check_association_upon_change(), ACE_OS::sleep(), subscriberQos_, and topic_.
◆ update_expr_params()
| void DCPS_IR_Subscription::update_expr_params | ( | const DDS::StringSeq & | params | ) |
Calls associated Publications.
Definition at line 738 of file DCPS_IR_Subscription.cpp.
References associations_, ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::begin(), ACE_Unbounded_Set_Ex< T, ACE_Unbounded_Set_Default_Comparator< T > >::end(), exprParams_, and id_.
Referenced by TAO_DDS_DCPSInfo_i::update_subscription_params().
◆ update_incompatible_qos()
| void DCPS_IR_Subscription::update_incompatible_qos | ( | ) |
Notify the reader of incompatible qos status and reset the status' count_since_last_send to 0
Definition at line 450 of file DCPS_IR_Subscription.cpp.
References CORBA::Exception::_tao_print_exception(), OpenDDS::DCPS::IncompatibleQosStatus::count_since_last_send, OpenDDS::DCPS::DCPS_debug_level, incompatibleQosStatus_, DCPS_IR_Participant::is_alive(), DCPS_IR_Participant::isOwner(), DCPS_IR_Participant::mark_dead(), participant_, and reader_.
Referenced by DCPS_IR_Topic_Description::try_associate_publication(), and DCPS_IR_Topic_Description::try_associate_subscription().
Member Data Documentation
◆ associations_
|
private |
Definition at line 202 of file DCPS_IR_Subscription.h.
Referenced by add_associated_publication(), disassociate_participant(), disassociate_publication(), disassociate_topic(), dump_to_string(), reevaluate_association(), reevaluate_existing_associations(), remove_associated_publication(), remove_associations(), and update_expr_params().
◆ defunct_
|
private |
Definition at line 203 of file DCPS_IR_Subscription.h.
Referenced by disassociate_participant(), disassociate_publication(), dump_to_string(), reevaluate_defunct_associations(), and remove_associations().
◆ exprParams_
|
private |
Definition at line 200 of file DCPS_IR_Subscription.h.
Referenced by get_expr_params(), and update_expr_params().
◆ filterClassName_
|
private |
Definition at line 198 of file DCPS_IR_Subscription.h.
Referenced by get_filter_class_name().
◆ filterExpression_
|
private |
Definition at line 199 of file DCPS_IR_Subscription.h.
Referenced by get_filter_expression().
◆ handle_
|
private |
Definition at line 189 of file DCPS_IR_Subscription.h.
Referenced by get_handle(), and set_handle().
◆ id_
|
private |
Definition at line 186 of file DCPS_IR_Subscription.h.
Referenced by add_associated_publication(), disassociate_participant(), disassociate_publication(), disassociate_topic(), dump_to_string(), get_id(), reevaluate_defunct_associations(), remove_associated_publication(), and update_expr_params().
◆ incompatibleQosStatus_
|
private |
Definition at line 205 of file DCPS_IR_Subscription.h.
Referenced by DCPS_IR_Subscription(), get_incompatibleQosStatus(), and update_incompatible_qos().
◆ info_
|
private |
Definition at line 195 of file DCPS_IR_Subscription.h.
Referenced by get_transportLocatorSeq().
◆ isBIT_
|
private |
Definition at line 190 of file DCPS_IR_Subscription.h.
Referenced by dump_to_string(), is_bit(), and set_bit_status().
◆ participant_
|
private |
Definition at line 187 of file DCPS_IR_Subscription.h.
Referenced by add_associated_publication(), disassociate_participant(), disassociate_publication(), disassociate_topic(), get_participant_id(), is_publication_ignored(), remove_associated_publication(), set_qos(), and update_incompatible_qos().
◆ qos_
|
private |
Definition at line 194 of file DCPS_IR_Subscription.h.
Referenced by get_datareader_qos(), and set_qos().
◆ reader_
|
private |
the corresponding DataReaderRemote object
Definition at line 193 of file DCPS_IR_Subscription.h.
Referenced by add_associated_publication(), DCPS_IR_Subscription(), disassociate_participant(), disassociate_publication(), disassociate_topic(), reader(), remove_associated_publication(), and update_incompatible_qos().
◆ serializedTypeInfo_
|
private |
Definition at line 201 of file DCPS_IR_Subscription.h.
Referenced by get_serialized_type_info().
◆ subscriberQos_
|
private |
Definition at line 197 of file DCPS_IR_Subscription.h.
Referenced by get_subscriber_qos(), and set_qos().
◆ topic_
|
private |
Definition at line 188 of file DCPS_IR_Subscription.h.
Referenced by get_topic(), get_topic_description(), get_topic_id(), reevaluate_association(), and set_qos().
◆ transportContext_
|
private |
Definition at line 196 of file DCPS_IR_Subscription.h.
The documentation for this class was generated from the following files:
