#include <DispatchService.h>

Public Types | |
| typedef bool | DispatchStatus |
| Typedef for Dispatch Return Values. More... | |
| typedef long | TimerId |
| Typedef for Schedule Return Values. More... | |
| typedef void(* | FunPtr) (void *) |
| typedef std::pair< FunPtr, void * > | FunArgPair |
Public Member Functions | |
| typedef | OPENDDS_DEQUE (FunArgPair) EventQueue |
| DispatchService (size_t count=1) | |
| virtual | ~DispatchService () |
| void | shutdown (bool immediate=false, EventQueue *pending=0) |
| DispatchStatus | dispatch (FunPtr fun, void *arg=0) |
| template<typename T > | |
| DispatchStatus | dispatch (T &ref) |
| Helper function to dispatch arbitrary function objects (see fun_ptr_proxy) More... | |
| TimerId | schedule (FunPtr fun, void *arg=0, const MonotonicTimePoint &expiration=MonotonicTimePoint::now()) |
| template<typename T > | |
| TimerId | schedule (T &ref, const MonotonicTimePoint &expiration=MonotonicTimePoint::now()) |
| Helper function to schedule arbitrary function objects (see fun_ptr_proxy) More... | |
| size_t | cancel (TimerId id, void **arg=0) |
| size_t | cancel (FunPtr fun, void *arg=0) |
| template<typename T > | |
| size_t | cancel (T &ref) |
| Helper function to cancel arbitrary function objects (see fun_ptr_proxy) More... | |
 Public Member Functions inherited from OpenDDS::DCPS::RcObject Public Member Functions inherited from OpenDDS::DCPS::RcObject | |
| virtual | ~RcObject () |
| virtual void | _add_ref () |
| virtual void | _remove_ref () |
| long | ref_count () const |
| WeakObject * | _get_weak_object () const |
Static Public Member Functions | |
| template<typename T > | |
| static void | fun_ptr_proxy (void *arg) |
| Helper function for adapting arbitrary function objects (with operator()) More... | |
Static Public Attributes | |
| static const bool | DS_SUCCESS = true |
| DispatchStatus Success Constant. More... | |
| static const bool | DS_ERROR = false |
| DispatchStatus Error Constant. More... | |
| static const long | TI_FAILURE = -1 |
| TimerId Failure Constant. More... | |
Private Types | |
| typedef std::pair< FunArgPair, TimerId > | TimerPair |
Private Member Functions | |
| void | run_event_loop () |
| typedef | OPENDDS_MULTIMAP (MonotonicTimePoint, TimerPair) TimerQueueMap |
| typedef | OPENDDS_MAP (TimerId, TimerQueueMap::iterator) TimerIdMap |
Static Private Member Functions | |
| static ACE_THR_FUNC_RETURN | run (void *arg) |
Private Attributes | |
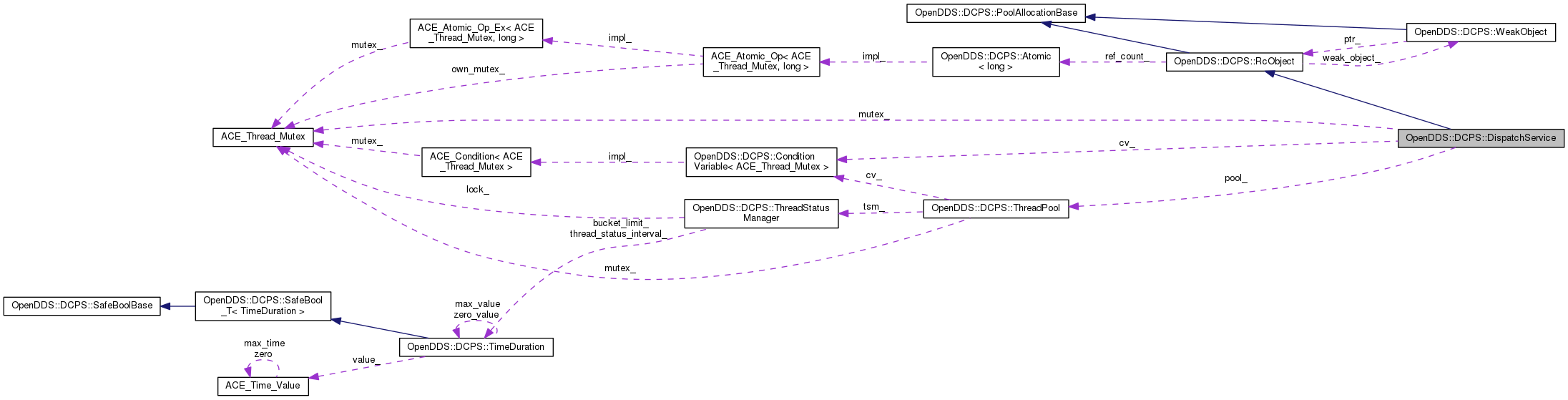
| ACE_Thread_Mutex | mutex_ |
| ConditionVariable< ACE_Thread_Mutex > | cv_ |
| bool | allow_dispatch_ |
| bool | stop_when_empty_ |
| bool | running_ |
| size_t | running_threads_ |
| EventQueue | event_queue_ |
| TimerQueueMap | timer_queue_map_ |
| TimerIdMap | timer_id_map_ |
| TimerId | max_timer_id_ |
| ThreadPool | pool_ |
Additional Inherited Members | |
| Protected Member Functions inherited from OpenDDS::DCPS::RcObject | |
| RcObject () | |
Detailed Description
Definition at line 24 of file DispatchService.h.
Member Typedef Documentation
◆ DispatchStatus
| typedef bool OpenDDS::DCPS::DispatchService::DispatchStatus |
Typedef for Dispatch Return Values.
Definition at line 36 of file DispatchService.h.
◆ FunArgPair
| typedef std::pair<FunPtr, void*> OpenDDS::DCPS::DispatchService::FunArgPair |
Definition at line 51 of file DispatchService.h.
◆ FunPtr
| typedef void(* OpenDDS::DCPS::DispatchService::FunPtr) (void *) |
Definition at line 50 of file DispatchService.h.
◆ TimerId
| typedef long OpenDDS::DCPS::DispatchService::TimerId |
Typedef for Schedule Return Values.
Definition at line 45 of file DispatchService.h.
◆ TimerPair
|
private |
Definition at line 129 of file DispatchService.h.
Constructor & Destructor Documentation
◆ DispatchService()
|
explicit |
Create a DispatchService
- Parameters
-
count the requested size of the internal thread pool
Definition at line 22 of file DispatchService.cpp.
◆ ~DispatchService()
|
virtual |
Definition at line 33 of file DispatchService.cpp.
References shutdown().
Member Function Documentation
◆ cancel() [1/3]
| size_t OpenDDS::DCPS::DispatchService::cancel | ( | DispatchService::TimerId | id, |
| void ** | arg = 0 |
||
| ) |
Cancel a scheduled event by id
- Parameters
-
id the scheduled timer id to cancel arg if specified, arg will be set to the arg value passed in at time of scheduling
- Returns
- the number of timers successfully canceled (0 or 1)
Definition at line 114 of file DispatchService.cpp.
References cv_, mutex_, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_all(), timer_id_map_, and timer_queue_map_.
Referenced by OpenDDS::DCPS::ServiceEventDispatcher::cancel().
◆ cancel() [2/3]
| size_t OpenDDS::DCPS::DispatchService::cancel | ( | FunPtr | fun, |
| void * | arg = 0 |
||
| ) |
Cancel a scheduled event by function pointer
- Parameters
-
fun the function pointer of the event/s to cancel arg the argument passed at time of scheduling
- Returns
- the number of timers successfully canceled (potentially several)
Definition at line 132 of file DispatchService.cpp.
References cv_, mutex_, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_all(), OPENDDS_ASSERT, timer_id_map_, and timer_queue_map_.
◆ cancel() [3/3]
|
inline |
Helper function to cancel arbitrary function objects (see fun_ptr_proxy)
Definition at line 119 of file DispatchService.h.
◆ dispatch() [1/2]
| DispatchService::DispatchStatus OpenDDS::DCPS::DispatchService::dispatch | ( | FunPtr | fun, |
| void * | arg = 0 |
||
| ) |
Dispatch an event
- Parameters
-
fun the function pointer to dispatch arg the argument to pass during dispatch
- Returns
- true if event successfully enqueue, otherwise false
Definition at line 74 of file DispatchService.cpp.
References allow_dispatch_, cv_, DS_ERROR, DS_SUCCESS, event_queue_, mutex_, and OpenDDS::DCPS::ConditionVariable< Mutex >::notify_one().
Referenced by OpenDDS::DCPS::ServiceEventDispatcher::dispatch().
◆ dispatch() [2/2]
|
inline |
Helper function to dispatch arbitrary function objects (see fun_ptr_proxy)
Definition at line 80 of file DispatchService.h.
References OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now().
◆ fun_ptr_proxy()
|
inlinestatic |
Helper function for adapting arbitrary function objects (with operator())
Definition at line 29 of file DispatchService.h.
References OpenDDS::DCPS::ref().
◆ OPENDDS_DEQUE()
| typedef OpenDDS::DCPS::DispatchService::OPENDDS_DEQUE | ( | FunArgPair | ) |
◆ OPENDDS_MAP()
|
private |
◆ OPENDDS_MULTIMAP()
|
private |
◆ run()
|
staticprivate |
Definition at line 152 of file DispatchService.cpp.
References run_event_loop().
◆ run_event_loop()
|
private |
Definition at line 159 of file DispatchService.cpp.
References allow_dispatch_, cv_, event_queue_, mutex_, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_all(), OpenDDS::DCPS::TimePoint_T< MonotonicClock >::now(), OPENDDS_END_VERSIONED_NAMESPACE_DECL, running_, running_threads_, stop_when_empty_, TheServiceParticipant, timer_id_map_, timer_queue_map_, OpenDDS::DCPS::ConditionVariable< Mutex >::wait(), and OpenDDS::DCPS::ConditionVariable< Mutex >::wait_until().
Referenced by run().
◆ schedule() [1/2]
| DispatchService::TimerId OpenDDS::DCPS::DispatchService::schedule | ( | FunPtr | fun, |
| void * | arg = 0, |
||
| const MonotonicTimePoint & | expiration = MonotonicTimePoint::now() |
||
| ) |
Schedule the future dispatch of an event
- Parameters
-
fun the function pointer to schedule arg the argument to pass during dispatch expiration the requested dispatch time (no earlier than)
- Returns
- -1 on a failure, otherwise the timer id for the future dispatch
Definition at line 89 of file DispatchService.cpp.
References allow_dispatch_, cv_, max_timer_id_, mutex_, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_one(), TI_FAILURE, timer_id_map_, and timer_queue_map_.
Referenced by OpenDDS::DCPS::ServiceEventDispatcher::schedule().
◆ schedule() [2/2]
|
inline |
Helper function to schedule arbitrary function objects (see fun_ptr_proxy)
Definition at line 96 of file DispatchService.h.
◆ shutdown()
| void OpenDDS::DCPS::DispatchService::shutdown | ( | bool | immediate = false, |
| EventQueue * | pending = 0 |
||
| ) |
Request shutdown of this DispatchService, which prevents sucessful future calls to either dispatch or schedule and cancels all scheduled events.
- Parameters
-
immediate prevent any further dispatches from event queue, otherwise allow current queue to empty pending An EventQueue object in which to store canceled events in case extra processing is required
Definition at line 38 of file DispatchService.cpp.
References ACE_ERROR, allow_dispatch_, OpenDDS::DCPS::ThreadPool::contains(), cv_, OpenDDS::DCPS::LogLevel::Error, event_queue_, LM_ERROR, OpenDDS::DCPS::log_level, mutex_, OpenDDS::DCPS::ConditionVariable< Mutex >::notify_all(), pool_, running_, running_threads_, ACE_Thread::self(), stop_when_empty_, TheServiceParticipant, timer_id_map_, timer_queue_map_, and OpenDDS::DCPS::ConditionVariable< Mutex >::wait().
Referenced by OpenDDS::DCPS::ServiceEventDispatcher::shutdown(), and ~DispatchService().
Member Data Documentation
◆ allow_dispatch_
|
private |
Definition at line 135 of file DispatchService.h.
Referenced by dispatch(), run_event_loop(), schedule(), and shutdown().
◆ cv_
|
mutableprivate |
Definition at line 134 of file DispatchService.h.
Referenced by cancel(), dispatch(), run_event_loop(), schedule(), and shutdown().
◆ DS_ERROR
|
static |
DispatchStatus Error Constant.
Definition at line 42 of file DispatchService.h.
Referenced by dispatch().
◆ DS_SUCCESS
|
static |
DispatchStatus Success Constant.
Definition at line 39 of file DispatchService.h.
Referenced by dispatch().
◆ event_queue_
|
private |
Definition at line 139 of file DispatchService.h.
Referenced by dispatch(), run_event_loop(), and shutdown().
◆ max_timer_id_
|
private |
Definition at line 142 of file DispatchService.h.
Referenced by schedule().
◆ mutex_
|
mutableprivate |
Definition at line 133 of file DispatchService.h.
Referenced by cancel(), dispatch(), run_event_loop(), schedule(), and shutdown().
◆ pool_
|
private |
Definition at line 143 of file DispatchService.h.
Referenced by shutdown().
◆ running_
|
private |
Definition at line 137 of file DispatchService.h.
Referenced by run_event_loop(), and shutdown().
◆ running_threads_
|
private |
Definition at line 138 of file DispatchService.h.
Referenced by run_event_loop(), and shutdown().
◆ stop_when_empty_
|
private |
Definition at line 136 of file DispatchService.h.
Referenced by run_event_loop(), and shutdown().
◆ TI_FAILURE
|
static |
TimerId Failure Constant.
Definition at line 48 of file DispatchService.h.
Referenced by schedule().
◆ timer_id_map_
|
private |
Definition at line 141 of file DispatchService.h.
Referenced by cancel(), run_event_loop(), schedule(), and shutdown().
◆ timer_queue_map_
|
private |
Definition at line 140 of file DispatchService.h.
Referenced by cancel(), run_event_loop(), schedule(), and shutdown().
The documentation for this class was generated from the following files:
